
Shuaimin ZHU, Wenge GUO, Tao LIU, Yuanjie ZHANG, Huangrong XU, Dengshan WU, Xiaojun ZHOU, Weixing YU. Target Localization Technology Based on Biomimetic Curved Compound Eye Camera[J]. Acta Photonica Sinica, 2023, 52(9): 0911003
- Acta Photonica Sinica
- Vol. 52, Issue 9, 0911003 (2023)
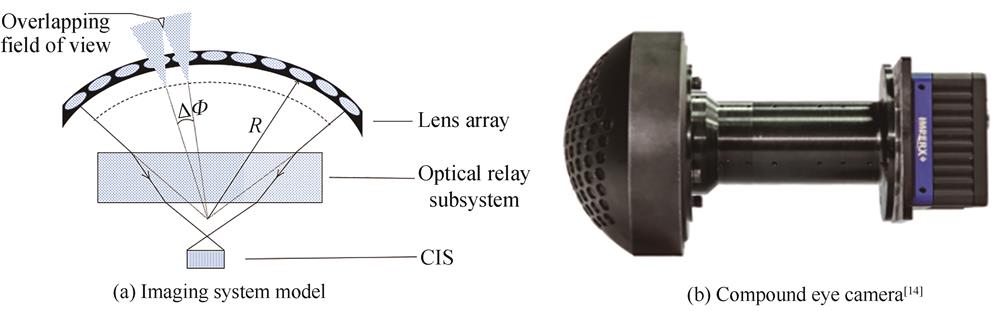
Fig. 1. Biomimetic compound eye camera system
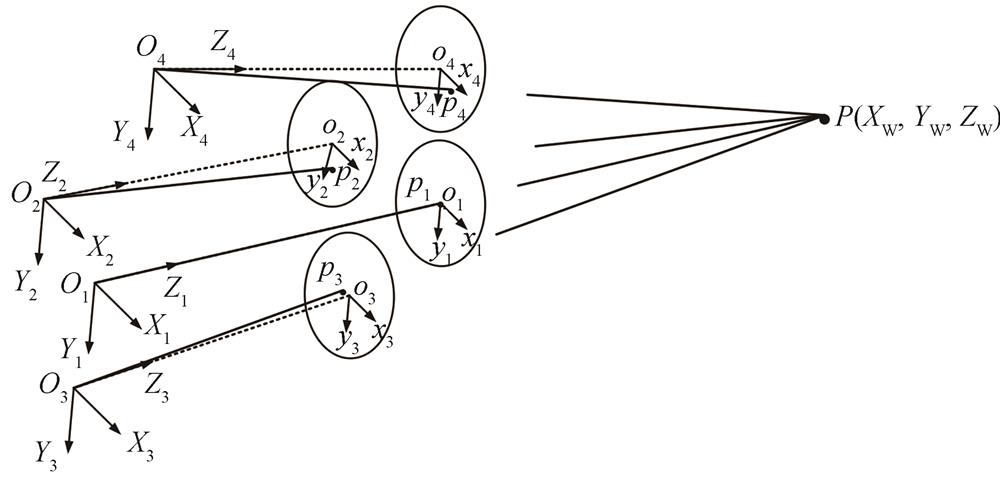
Fig. 2. Positioning principle of compound eyes
Fig. 3. Analysis of overlapping fields of view for adjacent sub eyes
Fig. 4. Center detection and sub eyes sorting
Fig. 5. Calibration board image captured by compound eye camera
Fig. 6. Schematic of light spot location
Fig. 7. Comparison of measurement results of measurement systems with different sub eye quantity
Fig. 8. Feature point matching process
Fig. 9. Reconstruction point cloud of the target
|
Table 1. Internal parameters of some sub eyes
|
Table 2. External parameters of some adjacent sub eyes
|
Table 3. Spot size at different distances
|
Table 4. Coordinate error of centroid of light spot at different distances
|
Table 5. Positioning error caused by centroid shift of light spot
|
Table 6. Measurement results of feature point spacing

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20