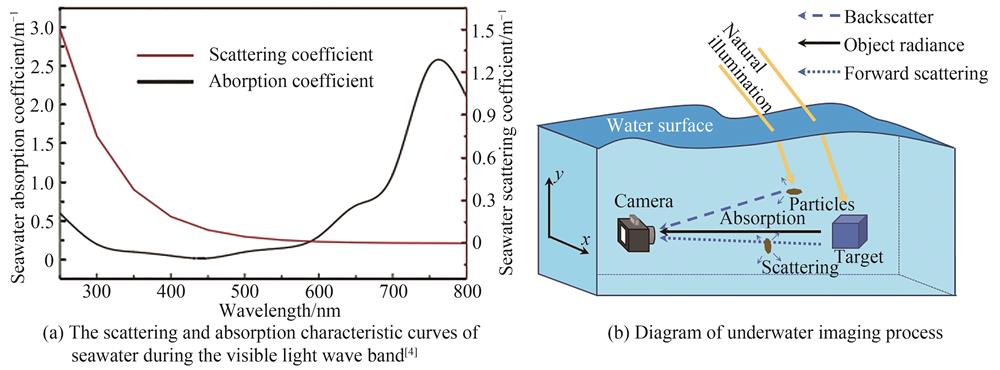
Fig. 1. Principle of underwater image degradation
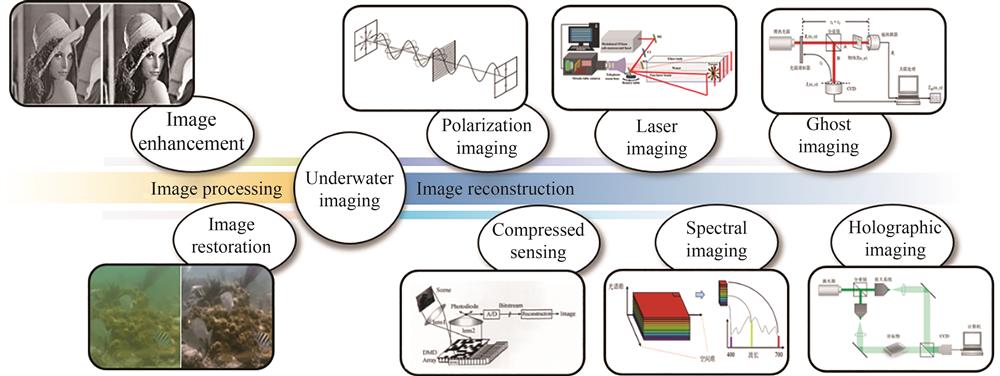
Fig. 2. Classification of underwater imaging
Fig. 3. CNN structure
Fig. 4. Effects of different algorithms before and after processing
[23] Fig. 5. The applications of deep learning in image enhancement
Fig. 6. Image enhancement effect by neural networks
Fig. 7. WaterGAN model structure
[32] Fig. 8. Image restoration results
[41] Fig. 9. Neural network for parameter estimation
[56] Fig. 10. Neural network for image restoration
Fig. 11. Diagram of our two-stage learning
[59] Fig. 12. Computational polarization difference imaging systems based on Stokes vector
[63] Fig. 13. The relationship between
K(
x,
y)and ∆
D(
x,
y)
[66] Fig. 14. Passive under water polarization imaging detection method in neritic area
[4] Fig. 15. Recovery results of different underwater objects
[61] Fig. 16. Recovery results of different underwater objects
[70] Fig. 17. Neural network for polarimetric underwater image recovery
Fig. 18. Four kinds of polarization-intensity information confluence models and its comparative versions
[73] Fig. 19. Comparison between raw images and restoration results of eight models
[73] Fig. 20. Schematic diagram of ghost imaging
Fig. 21. Structure of CGI
[77] Fig. 22. Reconstruction results of CSGI and GIDL at different sampling rates
[88] Fig. 23. Reconstruction results based on DL and CS methods at different concentrations
[87] Fig. 24. Comparison of simulation results of UGI-GAN,UDLGI,and PDLGI at different sampling rates
[84] Fig. 25. Hyperspectral image data cube
Fig. 26. HyperDiver UHI system and its components
[95] Fig. 27. A multi-faced dataset from HyperDiver
[95] Fig. 28. Color image of the seabed from UHI and SAM classification
[97] Fig. 29. Underwater spectral imaging with filterwheel
[89] Fig. 30. A tunable LED-based underwater multispectral imaging system
[98] Fig. 31. Staring underwater spectral imaging system with optimal waveband subset
[100] Fig. 32. Self-supervised hyperspectral and multispectral image fusion network
[110] Fig. 33. The structure of single pixel camera
[115] Fig. 34. Single-pixel imaging system
[116] Fig. 35. Reconstruction results by traditional FSI and FSPI
[129] Fig. 36. Reconstruction results of GAN-FSI and FSI at different sampling rates
[130] Fig. 37. CS-SRCNN network structure
[133] Fig. 38. LLS structure
Fig. 39. Principle of streak tubeimaging
[147] Fig. 40. Results of streak tube 3D imaging
[151-153] Fig. 41. The target imaging with the distance of 20 m in clear water was recorded by the lidar-radar
[158] Fig. 42. The principle of underwater range-gated imaging system
Fig. 43. Images of underwater target
[169] Fig. 44. Holographic imaging structure diagram
Fig. 45. Robot-driven DIHM
[198] Fig. 46. Rapidly extract focused targets from underwater digital holograms
[212] | Methods | Principle | Advantages | Disadvantages | Application |
|---|
| Spatial domainmethod | Adjust the gray scale and RGB channels of spatial pixels | Easy to implementandobvious effects | Easy to cause oversaturation and loss of details;Has a certain blindness | Adjust the overall or local over bright(dark)problem;Increase image contrast | | Frequency domainmethod | Transform images to the corresponding domain for filtering | Separate high and low frequency information;Enhance edge information;suppress interference noise;High processing efficient in the frequency domain | Limited effect on processing color distortion and low contrast | Denoising;Deblurring | | Color constancy method | According to the relationship between the environment and the target pixel,the environment information is estimated and the raw image is restored according to the hypothesis | Great color restoration effect | Rely on the accuracy of assumptions;Limited effect on image denoising | Color correction | | Method based on deep learning | The degraded image is restored by using the mapping between degraded image and restored image learned by neural network | Noise removal,color correction and contrast increase can be performed at the same time;No prior information is required | Network training takes time;Heavily dependence on datasets;Poor generalization ability | Denoising; Color correction;Improving contrast |
|
Table 1. Summary of traditional underwater image enhancement methods and deep learning methods
| Methods | Principle | Advantages | Disadvantages | Application |
|---|
| Restoration methods based on priori | The water features and related parameters are estimated by a priori hypothesis,and the images before degradation are restored by physical model | It is targeted and directional,and avoids blind recovery;Results recovered by physical model are natural | The choice of a priori hypothesis is subject to subjective influence;The model deviation and other restrictive factors make it difficult to apply in complex water environment | Deblurring; Color correction;Contrast enhancement | | Restoration methods based on deep learning | Neural network is used to learn the mapping between degraded image and related parameters to estimate model parameters,and restore the degraded image | It avoids subjective error caused by artificial selection of prior conditions and has certain generalization | It heavily relies on datasets;Artificial datasets differ from the real environment;It takes longer time compared with prior method | Deblurring; Color correction;Contrast enhancement |
|
Table 2. Summary of image restoration methods based on priori and deep learning
| Methods | Principle | Advantages | Disadvantages | Application |
|---|
| Polarization difference imaging | It uses the difference of the light vibration between the target and the background to remove the background scattering noise | Simple and effective | The restoration results of objects with various polarization and details are poor | Deblurring;Imaging in scattering media | | Passive polarization imaging | According to the difference of polarization characteristics between background scattered light and target light under natural light,the clear scene image is reconstructed by using underwater light transmission model | Distance information is added to the physical model,which has a significant restoration effect on complex scenes | The background area needs to be selected manually;The model is only applicable to objects with low degree of polarization;The recovery effect is poor under high scattering concentration;Uniform light field conditions are required | Deblurring;Imaging in scattering media | | Active polarization imaging | The active complete polarized light source is introduced,and the background scattering noise is removed by using the polarization characteristics difference between the background and the target reflected light | It is suitable for low illumination environment;Imaging quality is better than underwater passive polarization imaging | The restoration effect is limited when the difference between the target and the background polarization degree is small or the target contains multiple polarization degrees;The assumption that the polarization direction of the target light and the background scattered light in the model is the same is different from the reality | Deblurring;Imaging in scattering media | | Polarization imaging based on deep learning | It uses the additional information of polarization on light intensity to improve the effect of traditional intensity image restoration,recognition,fusion and reconstruction | It has better imaging quality and complete details than conventional imaging | It is heavily dependent on datasets and still in preliminary exploration | Deblurring;Imaging in scattering media |
|
Table 3. Summary of underwater polarization imaging methods and deep learning-based methods
| Methods | Principle | Advantages | Disadvantages | Application |
|---|
| TGI | It calculates the correlation of light field intensity fluctuation to reconstruct the target | Strong anti-interference ability;Lensless imaging;Wide scope of action | It needs two optical paths,which is complicated in experiment;A large amount of data needs to be collected,and the relevant calculation takes a long time;Low signal-to-noise ratio | Denoising;Imaging in scattering media | | CGI | The target image is obtained by calculating the intensity distribution and the second-order correlation of the intensity collected by the detector | The controllable light field is obtained by SLM or DMD,and the experiment is simplified to a single light path;Greater imaging perspective | It still needs to collect a large amount of data,and the relevant calculation takes a long time | Denoising;Imaging in scattering media | | CSGI | Compressed sensing is used for sparse sampling reconstruction of ghost image | It can reconstruct high-quality images at low sampling rate and shorten the sampling time;It hashigh signal to noise ratio | It needs mass computing,and signal processing takes long time | Imaging at a low sampling rate;Super resolution imaging | | DIGL | The neural network is used to learn the mapping between blurred image and clear image,or signal collected by bucket detector and reconstructed imaging to reconstruct the image | It avoids using illumination mode and acquires high quality images at a low sampling rate;The reconstruction from barrel detector avoids the complex calculation of CS reconstruction and has better results | Itstill needs mass computing,and heavily relies on datasets | Imaging at a low sampling rate |
|
Table 4. Summary of different ghost imaging methods and methods based on deep learning
| Methods | Principle | Advantages | Disadvantages | Application |
|---|
| Matrix factorization | Based on the linear spectral hybrid model,the end element spectral matrix with high spectral resolution and the abundance matrix with high spatial resolution are obtained by alternating non negative matrix decomposition of HS and MS data,and then the fused image with high spatial resolution and high spectral resolution are obtained by multiplication | The model theory is simple,easy to implement and close to the actual situation | It requires iterative solution and mass computing;Model parameters are sensitive and difficult to set;It relies on observation model | HS and MS fusion | | Tensor decomposition | HS is regarded as a three-dimensional tensor,which is decomposed into a three-mode factor matrix and a three-dimensional core tensor by Tucker decomposition. The core tensor is extracted from the high-resolution MS block set by tensor sparse coding,and is multiplied with the factor matrix to obtain images with high spatial resolution and high spectral resolution | The reconstruction quality is better than that based on matrix factorization | Model parameters are sensitive and difficult to set;It requires mass computing | HS and MS fusion | | Deep learning based | The mapping between HS and MS and hyperspectral images is established by using neural network for fusion | It has high reconstruction accuracy,high efficiency and good robustness without iteration | It relies heavily on datasets and has poor generalization | HS and MS fusion |
|
Table 5. Summary of traditional MS and HS fusion fusion method and deep learning-based method
| Methods | Principle | Advantages | Disadvantages | Application |
|---|
| Conventional SPI | The object image is reconstructed by cross-correlation between the illumination field modulated by random pattern and the value obtained by single pixel camera | It has great interference immunity,high single pixel detection frequency and great weak light detection capability | Better image quality requires far more sampling times than the number of reconstructed image pixels | Imaging in scattering media | | FSI/HSI | The Hadamard/ Fourier basis spectrum of the target image is obtained by modulating the light field with the Hadamard/ Fourier basis mask,and then the target image is reconstructed by applying the inverse Hadamard/ Fourier transform | It has great interference immunity,and reconstruct the object image without distortion | High frequency details are easy to be lost;Image artifacts exist;High quality reconstruction requires more sampling times | Imaging in scattering media | | Deeplearning based | Neural networks are used to learning the mapping ofimage or one-dimensional signalto reconstructed imagefor image reconstruction | It has high reconstruction efficiency,good reconstruction quality and certain de-noising ability | The network is prone to over fitting and takes time to train;It requires high adaptability and robustness of neural network | Imaging in scattering media |
|
Table 6. Summary of different SPI reconstruction methods and methods based on deep learning
| Methods | Principle | Advantages | Disadvantages | Application |
|---|
| LLS | According to the characteristic that the backscattered light of waterdecreases rapidly relative to the central axis of illumination,the target light and scattered light are separated in space | It reduces the influence of scattered light on imaging | Imaging equipment has large volume;It is impossible to avoid the influence of scattering medium on the transmission optical path;Lengthy imaging time leads to accuracy degradation | Imaging in scattering media | | STIL | The deflection module in the streak tube is used to convert the time information into the distance information to obtain the three-dimensional image | It has high imaging accuracy,fast imaging speed and large field of view | It is not suitable for moving target imaging;The system has a short imaging time,which cannot meet the needs of long-time photography | 3D imaging | | Range-gated imaging | The backscattered light in the process of light transmission is reduced by adjust the open time of laser and camera | It reduces the influence of scattered light on imaging,and has fast imaging speed | Laser energy is scattered,and only small field of view imaging can be performed;The system is costly with limited resolution,and the operation is complex | Imaging in scattering media;3D imaging |
|
Table 7. Summary of different underwater laser imaging methods
| Methods | Principle | Advantages | Disadvantages | Application |
|---|
| Fourier transform reconstruction | After the hologram is transformed into frequency domain by Fourier transform,the angle difference between the target light wave and other holographic components is used for separation,and then the spatial carrier is removed by inverse Fourier transform. The reconstructed image is obtained by calculating the diffraction integral | It can obtain the amplitude and phase information of objects in real time and quantitatively | It needs mass computing and prior knowledge;Only a single hologram can be processed each time,so the efficiency is low | 3D microscopic imaging | | Holographic reconstruction based on deep learning | Neural network is used to establish the mapping between hologram and reconstructed image for holographic reconstruction | It has high imaging efficiency and higher imaging quality;No prior knowledge is required | It relies heavily on data sets,requires a large number of different sample data and a wide range of reconstructed distance quantization models | Microbial 3D image reconstruction;3D particle field reconstruction;Microbial identification classification |
|
Table 8. Summary of Fourier transform reconstruction and reconstruction based on deep learning
| Application field | Network structure | Input-output | details | Loss function | Application problems |
|---|
| Underwater Image Enhancement | CNN,GAN | Image-image | Residual connection,Dense connection,Inception,Fusion, | L1,LSE,MSE,SSIM,GAN Loss | Deblurring[24,26-27],Color Correction[25,29],Dehazing[28-30],Image Generation[32-39] | | Underwater Image Restoration | CNN,GAN | Image-image,Image-parameters | Dense connection,Residual connection,Skip connection,Fusion,Inception | L1,Perpetual loss,MSE,GAN | Color Correction[54-56,57,58],Deblurring[59],Dehazing[57],Image Generation[60] | | Underwater Polarization Imaging | CNN | Image-image | Residual connection,Dense connection,Skip connection,Fusion, | MSE,Perpetual loss | Deblurring[71,73] | | Underwater Ghost Imaging | MLP,CNN,GAN | 1D signal-image,Image-image | Residual Connection,Dense Connection,Fusion,Inception | MSE,Perpetual loss,self-designed | LowSampling Rate Imaging[84-88],Deblurring[86,88] | | Underwater Spectral Imaging | CNN | MS image-Image | Skip Connection | L1 | Spectral Fusion[108-110] | | Underwater Compressed Sensing Imaging | CNN,GAN | Image-Image,1D signal-image | Skip Connection | MSE,GAN | Low Sampling Rate Reconstruction[85,130,132-133],Deblurring[130] | | Underwater Laser Imaging | — | — | — | — | — | | Underwater Holographic Imaging | CNN | Image-3D particle field,Image-classification result | Skip connection,Residual connection,Fusion, | Cross Entropy,MSE,L1,Huber loss[213] | Improve Efficiency[204,207,212],3D Particle Field Reconstruction[207],Classification[210-212] |
|
Table 9. Application of deep learning in underwater imaging