ObjectiveBinocular camera calibration is important to realize high-precision 3D measurements, dynamic target trajectory estimations, and 3D positioning through binocular vision. Zhang s traditional calibration method based on a checkerboard target is currently the most widely used camera calibration method. However, Zhang s calibration method has certain shortcomings. First, Zhang s calibration method requires multiple shots of the checkerboard target, rendering the calibration process cumbersome. Second, when using the checkerboard target for calibration, the calibration accuracy is often degraded owing to the acquisition of local target images; this may sometimes also lead to failure of calibration. Finally, Zhang s calibration method optimizes the parameters of a camera through reprojection constraints; moreover, the constraints are extremely singular, and hence, accurate camera calibration results cannot be obtained. To address the above-mentioned issues, this paper proposes a high-precision binocular camera calibration method based on a novel stereoscopic target.
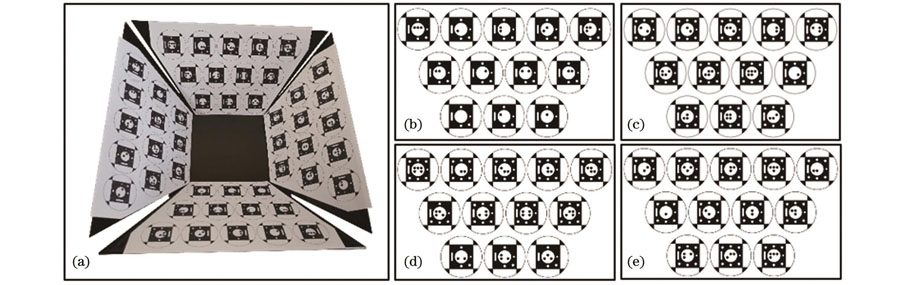
MethodsTo solve the problems encountered in Zhang s calibration method, first, this study adopted a new type of coding stereoscopic target composed of four encoded plane targets with different spatial attitudes so that only one target image was needed to collect to complete the binocular camera calibration. In each coding plane target, multiple independent coding units were arranged to eliminate the traditional checkerboard structure, which could effectively address occlusion of the target. Second, each calibration corner was coded by a new variable-capacity coding flag, which improved the matching efficiency and accuracy of points with the same name. Finally, to enrich the camera parameter optimization constraints, a high-precision parameter optimization method was adopted, exploiting the three-dimensional information of the coding stereoscopic target and introducing standard length and coplanar constraints, which effectively improved the calibration accuracy of binocular cameras.
Results and DiscussionsCompared with Zhang s traditional calibration method, the method proposed in this paper demonstrates significantly improved calibration efficiency and accuracy. In Zhang s calibration method, the checkerboard target must be shot multiple times, and each shot must ensure the integrity of the checkerboard target and the difference in the spatial posture of the checkerboard target. In contrast, the method proposed in this paper only requires to shoot the coding stereoscopic target once and can cope with the situation of the local target; therefore, the calibration efficiency is significantly improved. For the calibration accuracy, compared with Zhang s calibration method, the proposed method reduces the reprojection errors of the left and right cameras by 55.42% and 57.22%, respectively; the standard-length error by 41.28%; and the coplanarity error by 63.04% (Fig. 6). Simultaneously, when using the standard gauge block for verification, the measurement error of the proposed method is reduced by 54.61% compared with that of Zhang s calibration method (Fig. 8). When the locally encoded stereoscopic target is captured, the relative error between the left and right camera reprojection errors is 7.49%, the relative error of the standard-length error is 7.42%, and the relative error of the coplanar error is 6.36% compared with the complete target (Fig. 7). When a locally encoded stereoscopic target is recorded, the proposed method still demonstrates a high calibration accuracy for the binocular camera.
ConclusionsThis paper proposes a binocular camera calibration method based on a coding stereoscopic target, combined with high-precision parameter optimization. The coding stereoscopic target includes four encoded plane targets with different spatial attitudes. By arranging multiple encoding units in the encoded plane target and encoding each calibration corner, the binocular camera can be calibrated based on a single target image acquisition. Compared with Zhang s calibration method, which requires multiple shots of the checkerboard targets, the method proposed in this paper effectively improves the camera calibration efficiency. In this study, a high-precision parameter optimization method is used to establish an objective function that combines reprojection constraints, standard length, and coplanar constraints, thereby effectively improving the calibration accuracy of binocular cameras. The experimental results reveal that compared with Zhang s calibration method, the proposed method effectively reduces the mean absolute reprojection error, mean absolute standard-length error, and mean absolute coplanarity error of binocular camera calibration. In addition, when the locally coded stereoscopic target is captured, the proposed method can still efficiently complete binocular camera calibration, and the relative error of each mean absolute error is less than 8% compared with that when the completely coded stereoscopic target is captured. This condition satisfies the requirements of high-precision calibration of binocular cameras for optical measurements.