
Longdong HE, Rujin ZHAO, Yuebo MA, Yaxian HOU, Zifa ZHU, Sikang ZENG. Navigation Stars Correction Method of Rolling Shutter Exposure Star Tracker Based on Time Domain Constraint[J]. Acta Photonica Sinica, 2021, 50(3): 128
- Acta Photonica Sinica
- Vol. 50, Issue 3, 128 (2021)
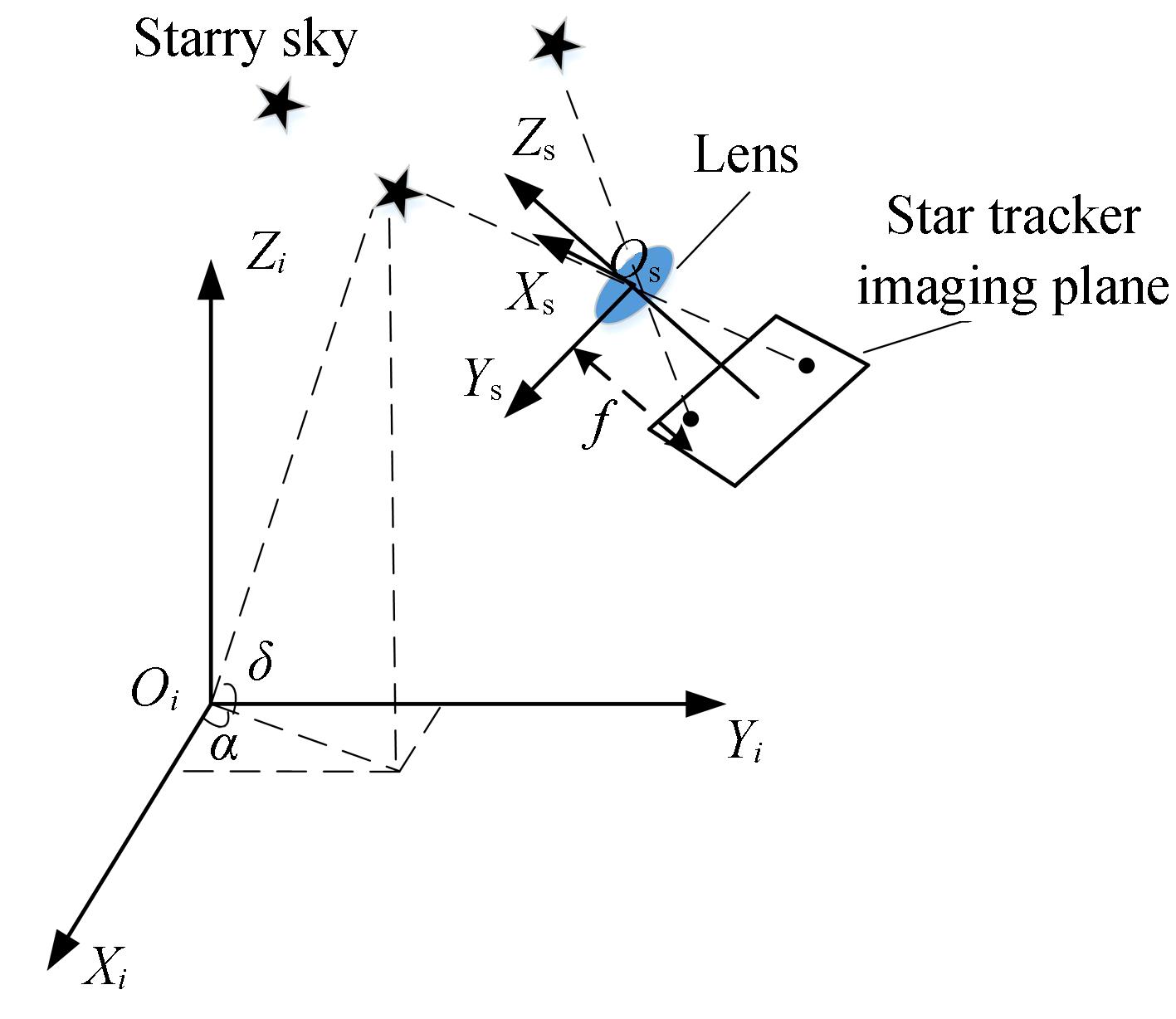
Fig. 1. Star tracker imaging principle
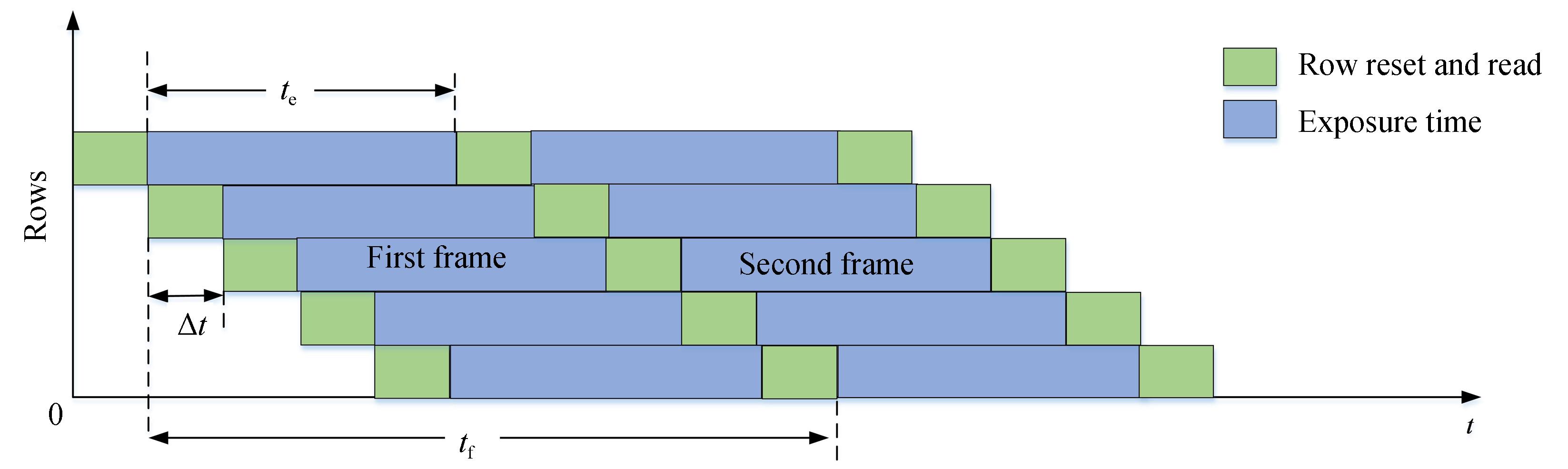
Fig. 2. Schematic diagram of rolling shutter exposure
Fig. 3. Comparison of static and dynamic navigation star point imaging.
Fig. 4. Star points correction method based on time domain constraints
Fig. 5. Rolling shutter exposure star diagram and imaging timing diagram
Fig. 6. When the X direction angular velocity is 1°/s, the position error, speed deviation and speed deviation after filtering are compared
Fig. 7. When the angular velocity in the Y direction is 1°/s, the position error, speed deviation and speed deviation after filtering are compared
Fig. 8. Average position error of navigation star point before and after filtering
Fig. 9. Speed deviation after filtering
Fig. 10. Centroid error analysis before and after star point distortion correction
Fig. 11. Star pair distance error corrected by different row exposure time of star map
Fig. 12. The distance error of the star pair before and after the correction
Fig. 13. Comparison of effects of correction methods
Fig. 14. Different angular velocity in X direction, average error of attitude angle
Fig. 15. Different angular velocity in Y direction, average error of attitude angle
|
Table 1. Star tracker parameters

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20