
Weiming Li, Feng Mei, Zeng Hu, Xingyu Gao, Haoyong Yu. Internal Propulsion Algorithm for Extracting Center of Line Laser Stripe[J]. Chinese Journal of Lasers, 2021, 48(11): 1104002
- Chinese Journal of Lasers
- Vol. 48, Issue 11, 1104002 (2021)

Fig. 1. Laser stripe of linear structured light
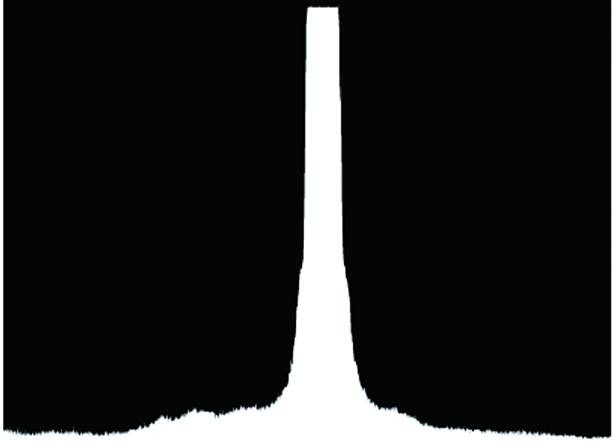
Fig. 2. Stripe cross section of linear structured light
Fig. 3. Area with poor reflection. (a) Fouling area of steel plate; (b) laser stripe weak light uneven area
Fig. 4. Weak light uneven area of laser strip with large slope change. (a) Plane area; (b) surface area
Fig. 5. Cross section pixel histogram of uneven area and low brightness with laser strip. (a) Low brightness area 1; (b) low brightness area 2; (c) uneven area 1; (d) uneven area 2
Fig. 6. Center break in low brightness uneven area
Fig. 7. Chain code representation. (a) Eight-neighborhood chain code representation; (b) eight-neighborhood coordinate representation
Fig. 8. Hypothetical laser stripe diagram
Fig. 9. Search strategy map
Fig. 10. Internal propulsion diagram
Fig. 11. Flow chart of proposed algorithm
Fig. 12. Experimental platform. (a) Platform 1; (b) platorm 2
Fig. 13. Extraction results of non-robust laser stripes. (a) Globally non-robust laser stripes; (b) bending non-robust laser stripes; (c) large slope non-robust laser stripes
Fig. 14. Laser stripe simulation image
Fig. 15. Center extraction result with threshold of 210
Fig. 16. Center extraction result with threshold of 100
Fig. 17. Reflective lamination of V-groove welds
Fig. 18. Extraction results of laser stripes in different interference environments. (a) Arc interference result; (b) splash interference result
|
Table 1. Error analysis of central coordinatesunit: pixel
|
Table 2. RMSE analysis of centerunit: pixel
|
Table 3. Running time of each algorithmunit: s
|
Table 4. Relative error analysis


Set citation alerts for the article
Please enter your email address

© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20