
Yuepeng Li, Yawen Cai, Runmin Li, Haosen Shi, Haochen Tian, Mingzhao He, Youjian Song, Minglie Hu. Large-scale absolute distance measurement with dual free-running all-polarization-maintaining femtosecond fiber lasers[J]. Chinese Optics Letters, 2019, 17(9): 091202
- Chinese Optics Letters
- Vol. 17, Issue 9, 091202 (2019)
Abstract
High-accuracy large-scale length measurements are becoming more demanding in a variety of scientific and industrial fields. For large-scale structure fabrication and assembly, the three-dimensional (3D) coordinate metrology at length scales of 5 to 100 m has become a routine requirement[
In recent years, absolute distance measurements based on femtosecond laser technology have become an active research field[
Compact and reliable femtosecond laser sources[
Sign up for Chinese Optics Letters TOC. Get the latest issue of Chinese Optics Letters delivered right to you!Sign up now
Despite the powerful all-PM NALM femtosecond laser technique and its potential for practical aerospace and industrial applications, its performance on absolute ranging has not been tested. In this Letter, we construct a simple and robust dual-comb LIDAR by employing two NALM mode-locked environmentally stable PM fiber lasers with ∼2 kHz offset repetition rate as laser sources. The absolute distance is measured through an ASOPS-based TOF method. A ranging accuracy of ±2 μm within 65 m is realized. A high update rate is maintained by using Kalman filtering for real-time data processing.
The NALM mode-locked fiber laser used for absolute ranging contains a fiber loop and a linear arm, as schematically shown in Fig.
![]()
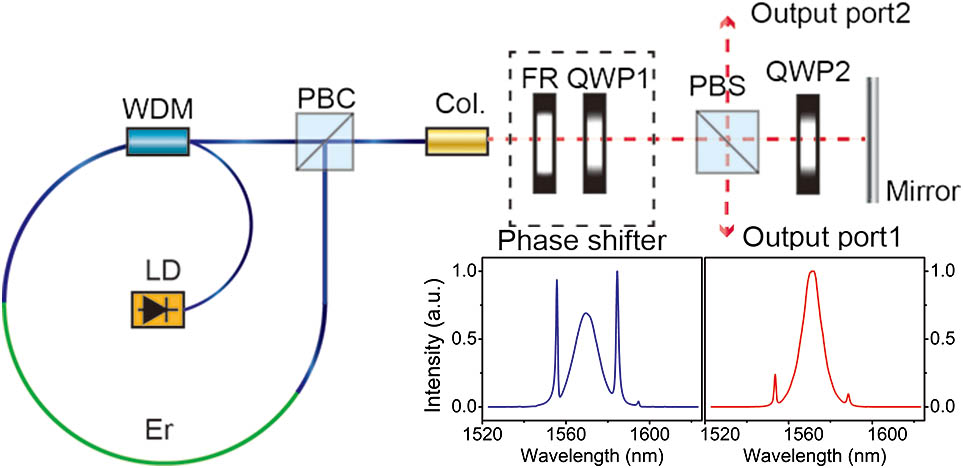
Figure 1.Configuration of all-PM NALM mode-locked fiber laser. WDM, 980/1550 nm wavelength division multiplexer; PBC, polarization beam coupler; Col., collimator; FR, Faraday rotator; QWP, quarter waveplate. The FR and QWP form the nonreciprocal phase shifter. Optical spectra of two mode-locked lasers. Blue line, laser 1; red line, laser 2.
Two home-built all-PM NALM mode-locked fiber lasers with ∼2 kHz repetition rate difference were used for the dual-comb ranging system. The optical spectra of the two lasers are shown in the inset of Fig.
| Parameters | Laser 1 | Laser 2 |
|---|---|---|
| Pump power | 218.7 mW | 220.3 mW |
| Output1 power | 6.20 mW | 7.69 mW |
| Output2 power | 15.58 mW | 14.66 mW |
| Repetition rate | 80.267 MHz | 80.269 MHz |
| 1569.4 nm | 1571.8 nm | |
| FWHM | 13.2 nm | 11.8 nm |
Table 1. Output Parameters of Two Lasers
The principle of ASOPS-based TOF measurement is shown in Fig.
![]()
Figure 2.Working principle of ASOPS. Two laser sources that have slightly different repetition frequency rates (
Equivalently, the SL pulses are temporally stretched by a factor of
To this end, the time interval of reflected reference and target pulses
The experimental setup of the femtosecond LIDAR system is shown in Fig.
![]()
Figure 3.Experimental setup of the robust LIDAR system. Two free-running all-PM lasers with slightly different repetition rates (∼80.267 MHz, ∼82.269 MHz) are used as the laser sources. An FC/PC connector having 4% Fresnel reflection at the surface and a hollow retroreflector are used as the reference and target mirror, respectively. The absolute distance between the reference and target mirrors is obtained through optical intensity cross-correlation between the reflected SL and LO pulses. Note that the telescope is focal length adjustable. SL, single laser; LO, local oscillator; ISO, isolator; HWP, half-waveplate; Col., collimator; Ref., reference mirror; Tar., target mirror; PBS, polarization beam splitter; PPKTP, periodically poled
A reference mirror, telescope, and target mirror are placed after port 2 of a fiber circulator. Note that the 4% Fresnel reflection from the end face of a ferrule connector/physical contact (FC/PC) connector acts as the reference mirror. A telescope (Thorlabs, C80APC-C) with adjustable focus length is used to collimate the beam for long-distance ranging. The target mirror is a hollow retroreflector installed at an 80 m granite rail at the National Institute of Metrology, China (NIM). The reflected pulses of the SL laser are combined with the LO pulses through a polarization beam splitter (PBS). Then, the reflected SL pulses are sampled by the LO via sum frequency generation in a type-II periodically poled
The absolute distance between the reference and target mirror is retrieved from the time interval between adjacent reference and target pulses in a stretched window, which is obtained by extracting the interval between peaks of the Gaussian fitted cross-correlation trace. The meter level non-ambiguity range can be resolved by non-ambiguity range extension approaches[
![]()
Figure 4.(a) Absolute distance measurement results of the femtosecond absolute ranger compared with the standard interferometers. (b) Residuals of measured distance versus truth data from standard interferometers at the NIM. The averaging period for the TOF measurement is 500 ms.
![]()
Figure 5.Allan deviations at absolute distances of 30 and 60 m. The measurement accuracy increases with the increase of averaging time and reaches less than 1 μm at 1 s averaging time.
Allan deviation in Fig.
![]()
Figure 6.Residuals of measured distance after the Kalman filter compared with the standard interferometers. The residuals and deviations are less than 3 μm, while the update rate is 200 Hz.
In conclusion, a robust dual-comb LIDAR system based on all-PM femtosecond fiber lasers is demonstrated. Large-scale absolute distance measurement is conducted at an 80 m granite rail at the NIM. The measurement residuals are less than 2 μm, and deviations are less than 6 μm with 500 ms averaging time over 65 m distance. Through the Kalman filter in data processing, the update rate increases to 200 Hz, while the micrometer accuracy is maintained. The all-PM fiber, high accuracy, and high update rate femtosecond LIDAR system shows great promise for various space-based large-scale measurement applications, such as distributed SAR remote sensing, gravitational wave detection, and a satellite formation flying-based astronomical telescope.
References
[1] W. T. Estler, K. L. Edmundson, G. N. Peggs, D. H. Parker. CIRP Ann., 51, 587(2002).
[2] G. Krieger, A. Moreira. IEEE Geoscience & Remote Sensing Symposium, 993(2010).
[3] J. Yun, C. Gao, S. Zhu, C. Sun, L. Niu. Chin. Opt. Lett., 10, 121402(2012).
[4] X. Wu, H. Wei, H. Zhang, J. Zhang. Appl. Opt., 52, 2042(2013).
[5] O. P. Lay, S. Dubovitsky, R. D. Peters, W. Steier. Opt. Lett., 28, 890(2003).
[6] J. Ye. Opt. Lett., 29, 1153(2004).
[7] J. Lee, S. Han, K. Lee, Y. J. Kim. Meas. Sci. Technol., 24, 045201(2013).
[8] Y. S. Jang, S. W. Kim. Nanomanuf. Metrol., 1, 131(2018).
[9] X. Zhao, X. Qu, F. Zhang, G. Tang. Opt. Lett., 43, 807(2018).
[10] G. Wu, M. Takahashi, H. Inaba, K. Minoshima. Opt. Lett., 38, 2140(2013).
[11] H. Zhang, H. Wei, X. Wu, Y. Li. IEEE Photon. J., 7, 6801508(2015).
[12] I. Coddington, W. C. Swann, L. Nenadovic, N. R. Newbury. Nat. Photonics, 3, 351(2009).
[13] T. A. Liu, N. R. Newbury, I. Coddington. Opt. Express, 19, 18501(2011).
[14] B. Lin, X. Zhao, M. He, Y. Pan. IEEE Photon. J., 9, 7106508(2017).
[15] Z. Zhu, G. Xu, K. Ni, Q. Zhou, G. Wu. Opt. Express, 26, 5747(2018).
[16] H. Zhang, H. Wei, X. Wu, H. Yang, Y. Li. Opt. Express, 22, 6597(2014).
[17] H. Shi, Y. Song, F. Liang, L. Xu, M. Hu, C. Wang. Opt. Express, 23, 14057(2015).
[18] Y. Li, J. Shi, Y. Wang, R. Ji, D. Liu, W. Zhou. Meas. Sci. Technol., 28, 075201(2017).
[19] G. Wu, Q. Zhou, L. Shen, K. Ni, X. Zeng, Y. Li. Appl. Phys. Express, 7, 106602(2014).
[20] W. Hänsel, H. Hoogland, M. Giunta, T. Steinmetz, R. Doubek. Appl. Phys. B, 123, 41(2017).
[21] W. Dai, Y. Song, B. Xu, A. Martinez, S. Yamashita, M. Hu. Chin. Opt. Lett., 12, 123502(2014).
[23] X. Wu, L. Yang, H. Zhang, H. Yang, H. Wei, Y. Li. Appl. Opt., 54, 1681(2015).
[24] J. Lee, K. Lee, Y. S. Jang, H. Jang, S. Han, S. H. Lee. Sci. Rep., 4, 5134(2014).
[25] M. Lezius, T. Wilken, C. Deutsch, M. Giunta, O. Mandel, A. Thaller. Optica, 3, 1381(2016).
[26] H. Zhang, H. Wei, X. Wu, H. Yang, Y. Li. Meas. Sci. Technol., 25, 125201(2014).
[27] P. Zarchan, H. Muso. Fundamentals of Kalman Filtering: A Practical Approach(2000).
[28] J. Yu, H. Shi, Y. Song, H. Cao, M. Hu, C. Wang. Chin. J. Lasers, 44, 0610001(2017).

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20