
Hai-Feng Zhang, Wen-Xu Wang. Complex system reconstruction [J]. Acta Physica Sinica, 2020, 69(8): 088906-1
- Acta Physica Sinica
- Vol. 69, Issue 8, 088906-1 (2020)
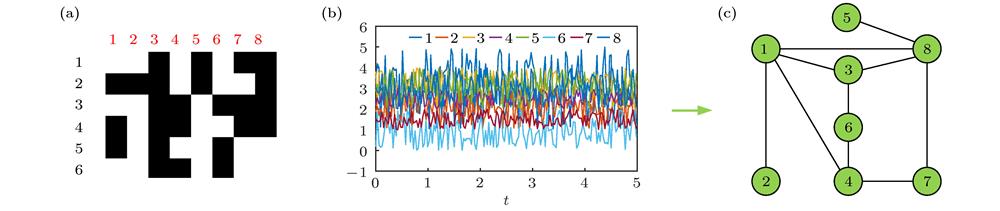
Fig. 1. Illustration of network reconstruction: (a) By using the discrete data; (b) the continuous data; (c) reconstruct network.
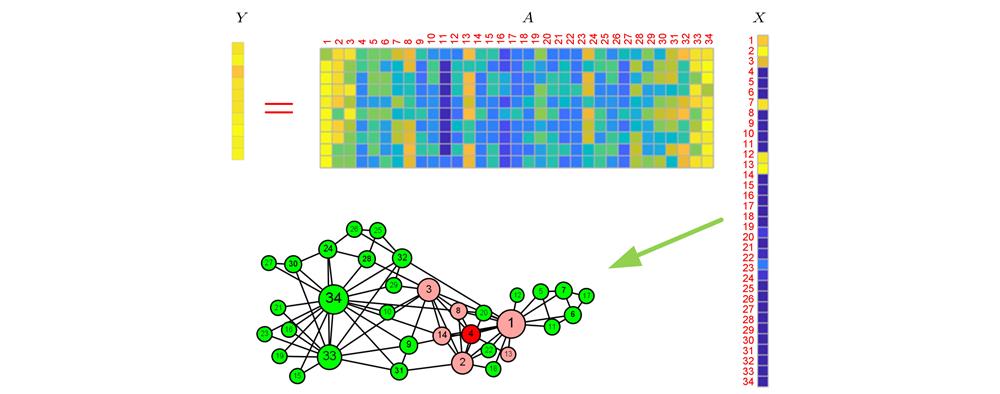
Fig. 2. Reconstructing of node 4 in the Karate network based on compressive sensing framework (the reconstruction method is introduced in Subsec. 2.4 ).
Fig. 3. Driving-response experiments. System is shifted from one stable state (the stable state is a fixed point (a), or a periodical trajectory (b)) to another position by input a driving signal I . The difference of the trajectories contains information about the topology.
Fig. 4. Reconstructing the neighbors of node 33 in Karate network: (a) The real structure of the Karate network; (b) the binary state data; (c) inferring the neighbors of node 33 based on EM algorithm; (d) the real neighbors of node 33.

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20