In the field of unmanned surface vehicle (USV), the intelligent perception is essential for decision-making process, which provides environmental information for the navigation system. Lidar can effectively address the problem brought by detection blind spots of other sensors with its close-range, high-precision, and all-weather capability, which enables USV to possess all-round and high-precision water surface perception ability. However, in practice, sea clutter often causes serious interference with the detection of lidar, resulting in false alarms in the perception system. In the pre-processing stage of lidar, traditional filtering algorithms are difficult to cope with complex marine environments, which may lead to omitted alarms due to insufficient subdivision. Therefore, a suitable sea clutter filtering algorithm is crucial for applications of lidar on USVs.
To deal with the interference brought by the sea clutter to the perception system of USV, we propose a intensity-space combined sea clutter filtering method. Noticeably, the sea clutters can be divided into two types. The first type is characterized by a significantly lower intensity than the target point cloud, which corresponds to a dense spatial distribution and a large point cloud, while the second type has an intensity similar to that of the target point cloud, whose spatial distribution is discrete and point cloud is sparse. For the first type of clutter, the dynamic intensity threshold is set for filtering, and for the second type of clutter, the spatial outlier algorithm is used for filtering. In order to make the intensity threshold conform to the changes of real marine environment, the threshold of the intensity filter is corrected according to the filtering results after outlier filtering, so that it can reflect the environmental characteristics and obstacle changes in each region. The main idea of the method is to take the filtered outliers as a sample of the higher intensity part of the sea clutter, which embodies the intensity characteristics of the clutter in the current region. In addition, the correction value of the intensity threshold is obtained by processing the point cloud in this part. The algorithm is tested on a real ship with 196 consecutive frames starting from the time of departure, where there are multiple dynamic targets, including a cruise ship and two sailing ships. Object detection uses Euclidean clustering algorithm for extraction. When there is a loss of targets in a frame, it is marked as an omitted alarm, and targets with clutter are marked as false alarms. The test results are compared with those of the intensity threshold filtering method.
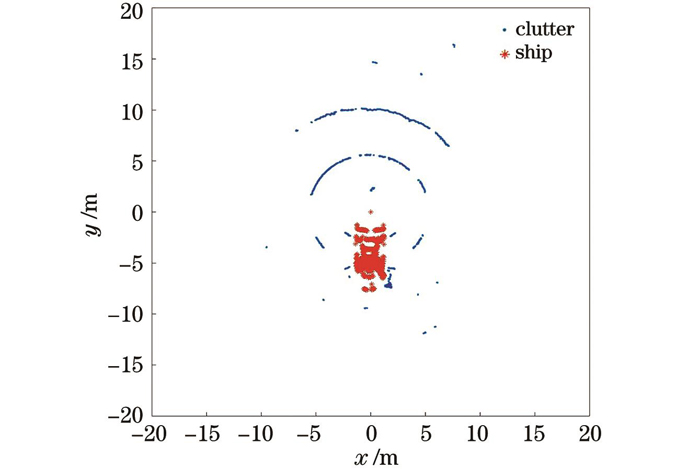
The results of the real ship experiment show that the algorithm has significantly reduced the false alarm rate and the omitted alarm rate. When the filtering rate achieved by the intensity threshold filtering is 80%, our algorithm can reduce the false alarm rate by 5.61% and the omitted alarm rate by 8.68%. When the filtering rate realized by the intensity threshold filtering is 90%, our algorithm can decrease the false alarm rate by 3.06% and the omitted alarm rate by 12.25% (Table 4). This verifies that the algorithm has obvious advantages over the intensity threshold filtering method of different filtering rates. When the target signal is occluded by an obstacle, the intensity of the target point cloud is lower than that of the usual target point cloud, and the intensity threshold filtering is easy to cause omitted alarms. In this case, the proposed algorithm can better adapt to the scene (Fig. 10). When the target passes through the USV at a high speed, there will be high-intensity clutter around, and the intensity threshold filtering is easy to cause false alarms. In this case, our algorithm is also applicable by adaptively increasing the intensity threshold (Fig. 11). Experimental results show that the proposed algorithm can adapt to different maritime environments and effectively reduce the false alarm rate and omitted alarm rate during perception.
In this paper, an intensity-space combined filtering method for marine lidar is proposed. For the intensity information that is susceptible to local dynamic obstacles and sea conditions, the dynamic intensity threshold is set after regional segmentation. For the small number of high-intensity clutter points left after the intensity threshold filtering, the spatial outlier filtering method is adopted for processing. At the same time, the intensity characteristics of spatial outliers are extracted as the basis for correcting the dynamic threshold, which makes the changes of dynamic threshold coincide with the changes of environments. The results of the real ship experiments show that compared with the intensity threshold filtering method, the proposed method reduces the false alarm rate and omitted alarm rate in face of dynamic targets by 4.34% and 10.47%, respectively, which verifies the feasibility of the proposed method.