
Huijuan Yu, Yubing Wang, Shuhua Zhao, Mingshi Zhang, Yue Song, Cheng Qiu, Yuxin Lei, Peng Jia, Lei Liang, Li Qin, Lijun Wang. Research on Automatic Driving Lidar Ranging Method Based on TDC[J]. Chinese Journal of Lasers, 2024, 51(8): 0810002
- Chinese Journal of Lasers
- Vol. 51, Issue 8, 0810002 (2024)
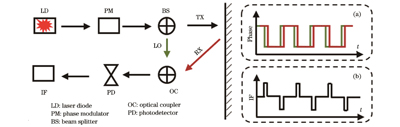
Fig. 1. Schematic of working mechanism of PhMCW ranging lidar. Insets: (a) Lidar system; (b) IF signal
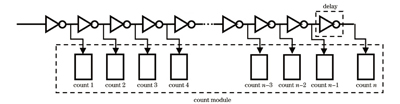
Fig. 2. Schematic of working mechanism of strict counting chain structure
Fig. 3. Schematic of working mechanism of strict counting chain counter
Fig. 4. Schematic of TDC module design principle
Fig. 5. Schematic of TDC performance test system
Fig. 6. Measurement results of test signals. (a) 200 ns signal; (b) 1000 ns signal
Fig. 7. Analysis of measurement results (pulse width of 6‒50 ns). (a) Test results with different pulse widths; (b) RMS
Fig. 8. Analysis of measurement results (pulse width of 100‒1240 ns). (a) Test results with different pulse widths; (b) RMS
Fig. 9. Spectrogram analysis of measurement results. (a) Sampled data after processing by Hanning window function; (b) spectrum of measurement results
Fig. 10. Test result of frequency of FPGA switching power supply
Fig. 11. Schematic diagram of lidar system
Fig. 12. Analysis of lidar system measurement results. (a) Experimental results versus distance; (b) RMS versus distance
Fig. 13. Amplified standard pulsed signal captured by oscilloscope


Set citation alerts for the article
Please enter your email address

© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20