
Qiqi Li, Xianghong Hua, Bufan Zhao, Wuyong Tao, Cheng Li. New Method for Plane Segmentation of Indoor Scene Point Cloud[J]. Chinese Journal of Lasers, 2021, 48(16): 1604002
- Chinese Journal of Lasers
- Vol. 48, Issue 16, 1604002 (2021)

Fig. 1. Processing flow of proposed method
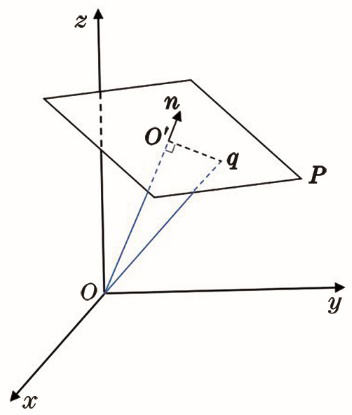
Fig. 2. Projection length model of point cloud
Fig. 3. Three sets of data used in experiment. (a) data 1; (b) data 2; (c) data 3
Fig. 4. Number of stratified point clouds
Fig. 5. Normal Gaussian map and point cloud before and after normal constraint. (a) Gaussian ball; (b) partial zoom; (c) constrained normal vector; (d) point cloud at maximum layer 1; (e) point cloud at maximum layer 2; (f) constrained point cloud
Fig. 6. Preliminary segmentation results of data 1. (a) Partitioned plane point clouds; (b) floor and ceiling plans; (c) residual point clouds
Fig. 7. Plane segmentation results of data 1 after model optimization
Fig. 8. Plane segmentation results of point clouds in data 2 and data 3. data 2 plane point cloud, (a) segmentation results, (b) residual point cloud; data 3 plane point cloud, (c) segmentation results, (d) residual point cloud
|
Table 1. Parameters of planes in point cloud of data 1 scene
|
Table 2. Comparison between peak interval of projection length ρ of plane model and projection length of point cloud
|
Table 3. Segmentation precision of plane point cloud
|
Table 4. Deflection angle of planes
|
Table 5. Segmentation time-consuming of plane point clouds

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20