
Feng Lu, Zhenzhong Wang, Xuepeng Huang, Pengli Lei. Modal analysis and mid-spatial-frequency errors suppression of 6-DOF bonnet polishing robot[J]. High Power Laser and Particle Beams, 2022, 34(11): 119001
- High Power Laser and Particle Beams
- Vol. 34, Issue 11, 119001 (2022)
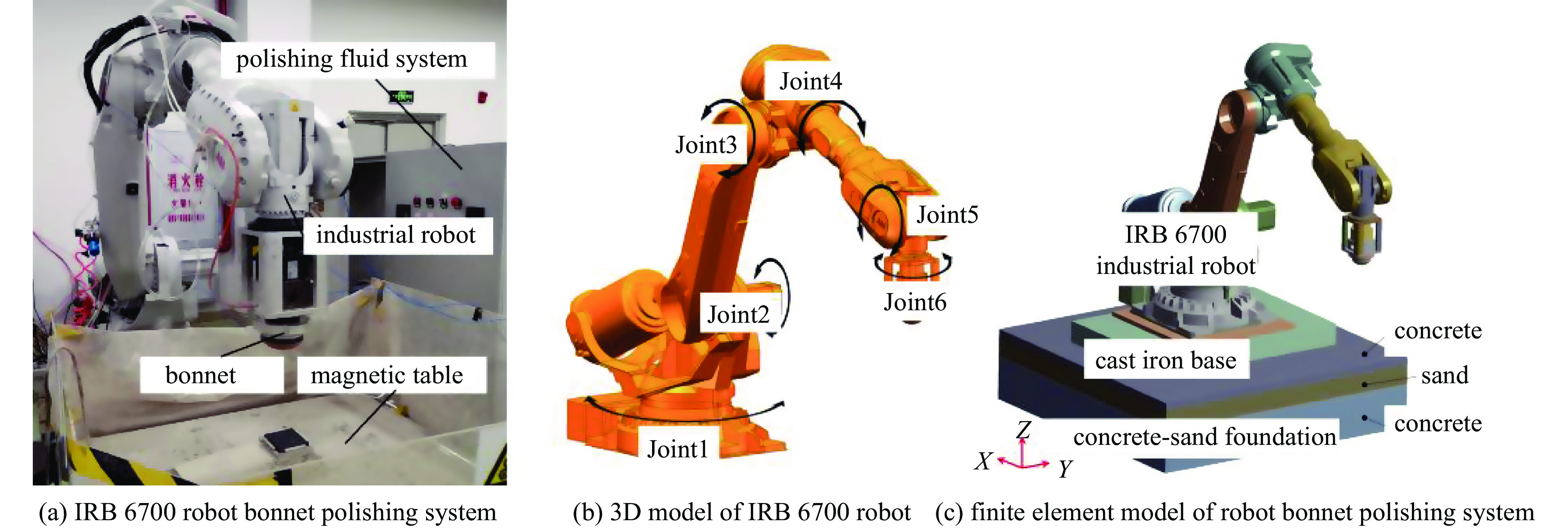
Fig. 1. Robot bonnet polishing system
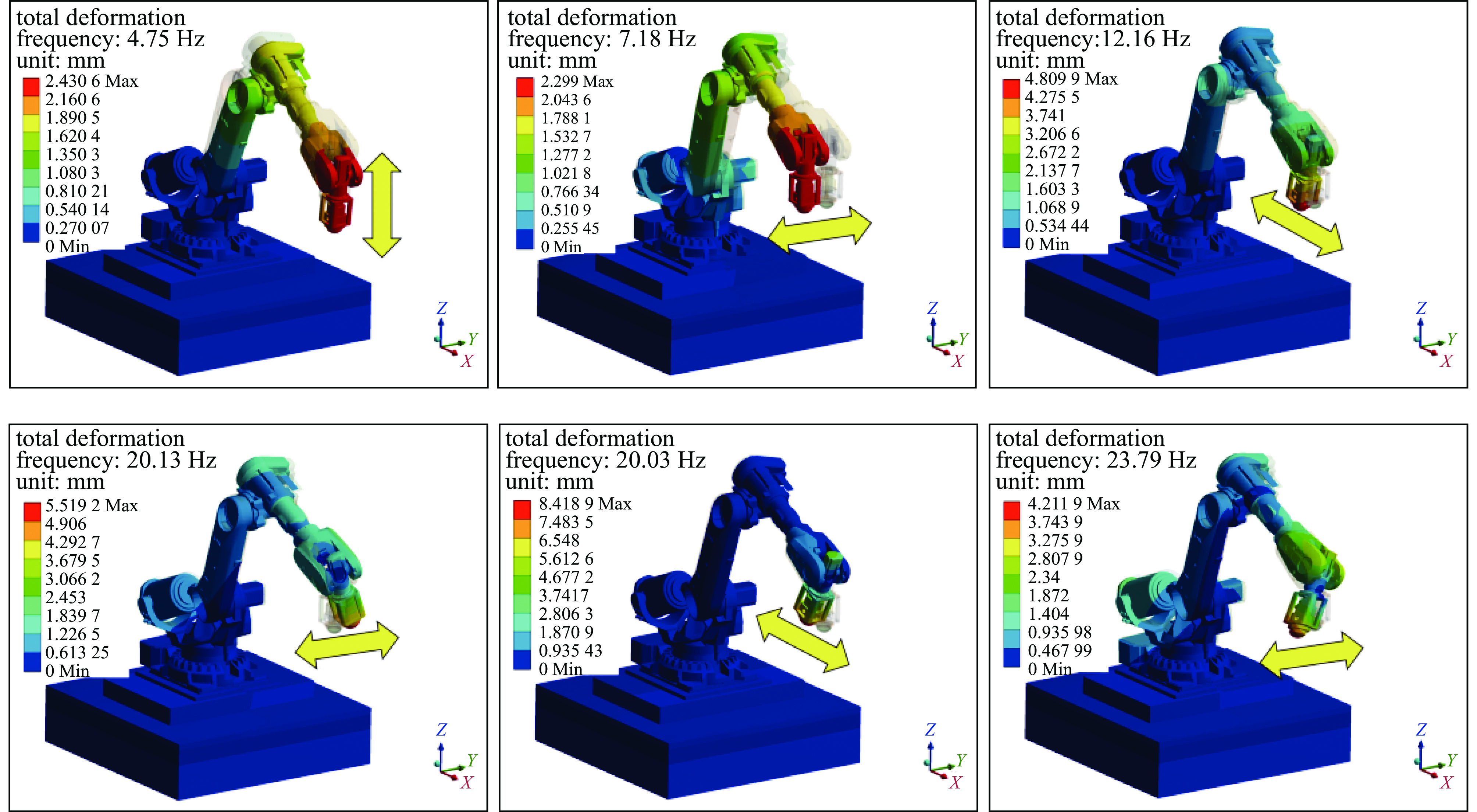
Fig. 2. Mode shapes of the industrial robot
Fig. 3. Sensor placement in pulse excitation method modal experiment
Fig. 4. Acceleration response spectrum of each measuring point of the robot in dual postures
Fig. 5. Industrial robot vibration measurement site
Fig. 6. Displacement response of each joint point of an industrial robot at variable speed idling
Fig. 7. Elastic component simulation model
Fig. 8. Simulated energy consumption values of elastic components of different specifications
Fig. 9. Three-dimensional structure diagram of bonnet tool
Fig. 10. Free vibration curves
Fig. 11. Comparison of fixed-point polishing RMS between ordinary bonnet tool and vibration suppression bonnet tool
Fig. 12. Comparison of spectra of fixed-point polishing spots between ordinary bonnet tool and vibration suppression bonnet tool
Fig. 13. Comparison of the polishing effect of the original bonnet tool and the vibration suppression bonnet tool
Fig. 13. [in Chinese]
Fig. 14. Comparison of the Y -direction mid-frequency error between the whole surface polishing of the original bonnet tool and the whole surface polishing of the vibration suppression bonnet tool
|
Table 1. Bonnet polishing system parameters
|
Table 2. Simulation material parameters
|
Table 3. IRB 6700 joint stiffness
| ||||||
Table 5. Mooney-Rivilin hyperelastic constitutive model
| ||||||||||||||||||||
Table 6. The third-order generalized Maxwell viscoelastic constitutive model
|
Table 7. Comparison of the polishing effect of the original bonnet tool and the vibration suppression bonnet tool

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20