
Lei Tang, Jiangshan Tang, Haodong Wu, Jing Zhang, Min Xiao, Keyu Xia, "Broad-intensity-range optical nonreciprocity based on feedback-induced Kerr nonlinearity," Photonics Res. 9, 1218 (2021)
- Photonics Research
- Vol. 9, Issue 7, 1218 (2021)
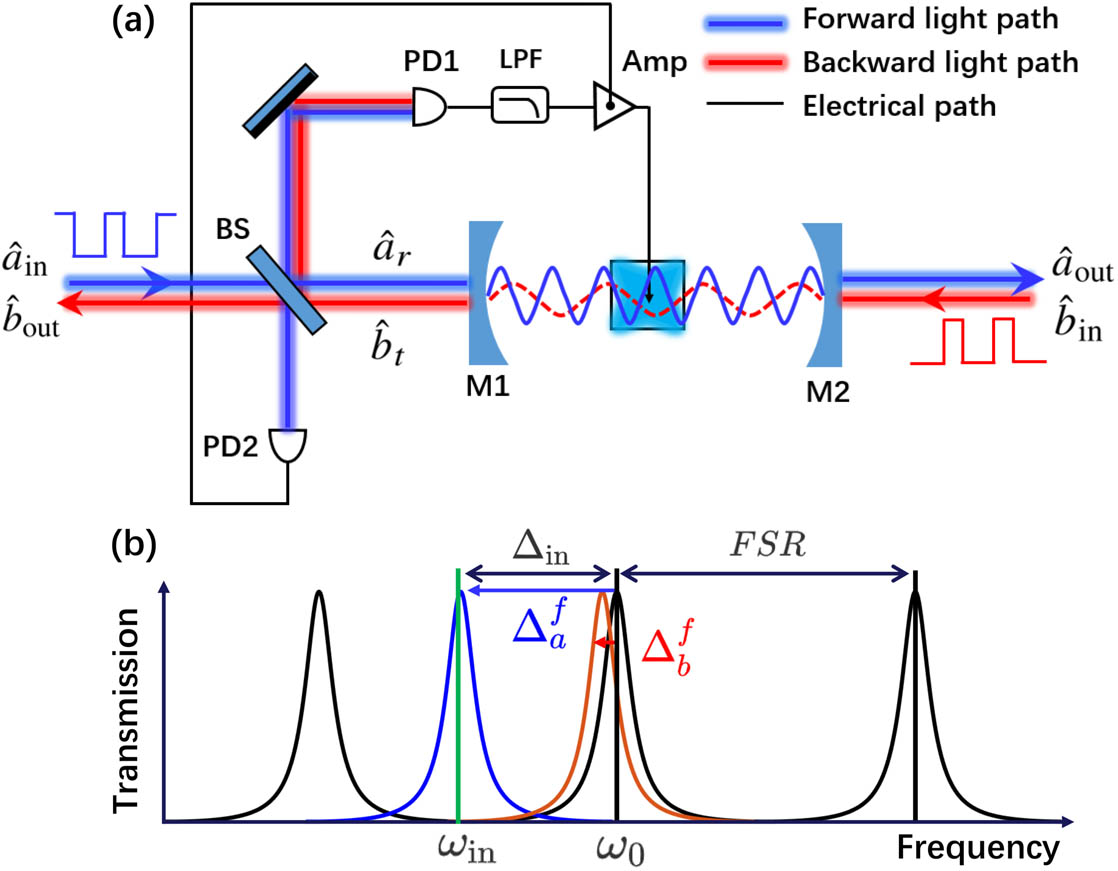
Fig. 1. Schematic diagram of the nonreciprocal propagation system. (a) Schematic of the system consisting of a feedback circuit and an FP cavity containing an EO nonlinear crystal. The feedback circuit includes a low-pass filter (LPF), an electric amplifier (Amp), and two photodetectors (PD1 and PD2). Left-handed incident light propagates in the forward direction and transmits through the beam splitter (BS) to excite the cavity. The reflected light of the cavity is reflected by the BS and a mirror successively, and then it is detected by PD1. The output current of PD1 is filtered by the LPF and amplified by the amplifier. Then the current modulates the EO nonlinear crystal and changes the transmission of the cavity. PD2 is used to monitor a fraction of the left-handed incident light and control the gain of the amplifier. Right-handed incident light moves in the backward direction, transmits through the cavity, and is reflected by the BS and the mirror and then captured by PD1. In the same way, the output current drives the EO nonlinear crystal and modulates the transmission of the cavity. (b) Transmission spectrum of the system. Black curves are for transmissions of the FP cavity without feedback. Blue (red) curves are for transmissions of the feedback-modulated cavity in the forward (backward) case. Green vertical bar is for the frequency of incident light (ω in ω 0
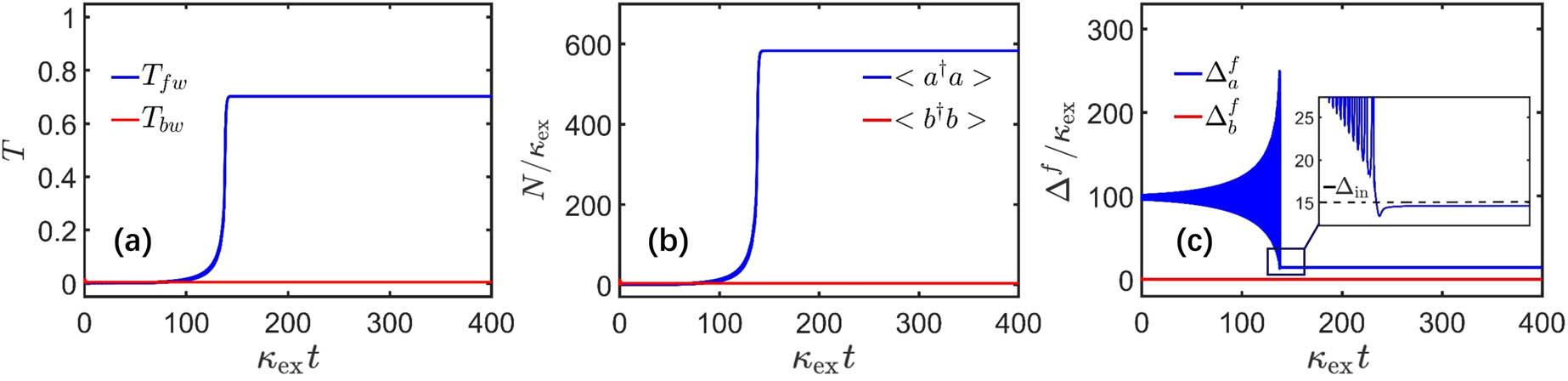
Fig. 2. Nonreciprocal transmission properties. (a) Nonreciprocal transmission. Blue (red) curve is for the forward (backward) transmission T fw T bw − Δ in = 15 κ ex Δ a , ss f ≈ 14.6 κ ex Δ b , ss f ≈ 0.5 κ ex 7 ) and (14 ) numerically with parameters: γ = 0.01 κ i = 0.2 κ ex ω c = 190 κ ex A = 12 Δ in = − 15 κ ex P in / ℏ ω in = 830 κ ex
Fig. 3. Analytical and numerical steady-state results. Solid curves are for analytical results, and dots are for numerical results. (a) Blue (red) curve represents forward (backward) transmission versus log 10 ( γ ) η ℒ log 10 ( γ ) κ i = 0.2 κ ex κ i κ i γ = 0.01 ω c = 190 κ ex A = 12 Δ in = − 15 κ ex
Fig. 4. Steady-state transmissions of the non-adaptive feedback control system. (a), (b) Forward and backward transmissions versus input intensities and the detunings. (c) Forward (blue curve) and backward (red curve) transmissions versus input intensities for Δ in = − 15 κ ex P in / ℏ ω in = 830 κ ex 7 ) and (14 ) numerically with parameters: γ = 0.01 κ i = 0.2 κ ex ω c = 190 κ ex A = 12
Fig. 5. Steady-state transmissions of intensity-adaptive feedback control system. (a), (b) Forward and backward transmissions versus input intensities and detunings. (c) Blue (red) line is for forward (backward) transmission versus input intensities for Δ in = − 15 κ ex γ = 0.01 κ i = 0.2 κ ex ω c = 190 κ ex Δ a , in f , opt = 104 κ ex
Fig. 6. Propagation of rectangle pulses in forward and backward directions. Solid curves are the input rectangle pulse trains, and dashed curves are the transmitted pulses. Blue (red) curve shows the forward (backward) propagation of the pulses. τ p τ d 7 ) and (14 ) numerically with parameters: γ = 0.01 κ i = 0.2 κ ex ω c = 190 κ ex A = 12 Δ in = − 15 κ ex P in / ℏ ω = 830 κ ex τ h 138 κ ex − 1


Set citation alerts for the article
Please enter your email address

© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20