
Yonghong Wang, Wanlin Chen, Bingfei Hou, Biao Wang. Position and Pose Estimation of Rigid Body Based on Three-Dimensional Digital Image Correlation[J]. Acta Optica Sinica, 2024, 44(8): 0812005
- Acta Optica Sinica
- Vol. 44, Issue 8, 0812005 (2024)
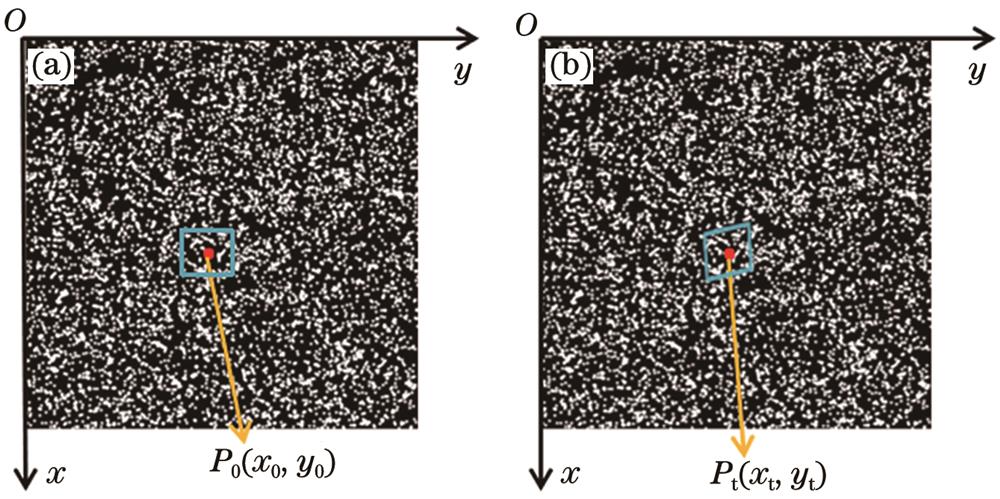
Fig. 1. Principle of DIC. (a) Reference image; (b) deformed image
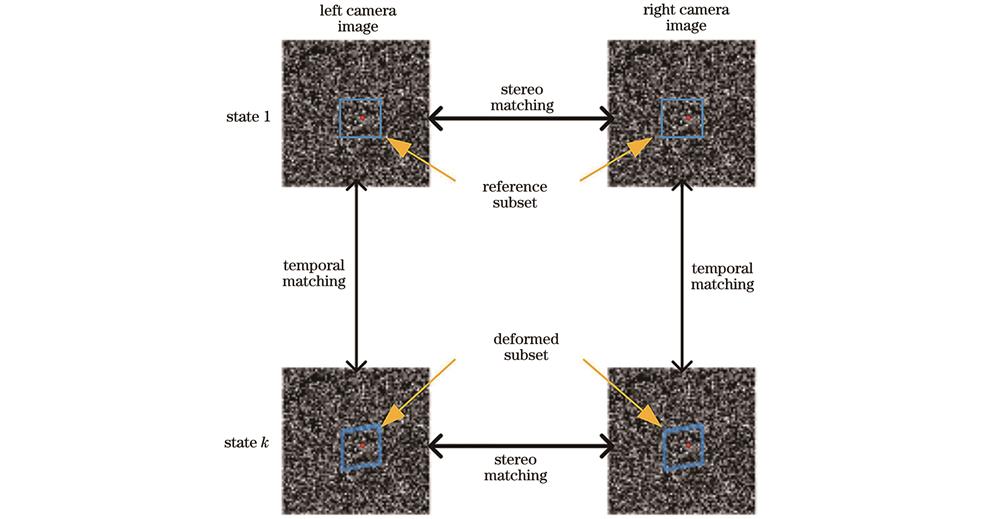
Fig. 2. Principle of 3D-DIC
Fig. 3. Schematic diagram of pose estimation system based on DIC
Fig. 4. Flow chart of pose estimation system based on DIC
Fig. 5. Physical diagram of measurement system
Fig. 6. Measurement results of three translational degrees of freedom. (a) Absolute error; (b) relative error
Fig. 7. Measurement results of yaw angle
Fig. 8. Experimental diagram of roll angle measurement
Fig. 9. Measurement results of roll angle
Fig. 10. Measurement results of large angle of original and improved methods. (a) Absolute error; (b) relative error
Fig. 11. Flow chart of comparison experiment
| ||||||||||||||
Table 1. Results of camera calibration
| ||||||||||||||||||||
Table 2. Comparison between proposed method and space vector method

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20