
Tianyu Yuan, Xiangjun Dai, Fujun Yang. Influence Evaluation of Systematic Errors and Prismatic Postures on Field of View in Monocular Stereo Vision[J]. Acta Optica Sinica, 2024, 44(8): 0812004
- Acta Optica Sinica
- Vol. 44, Issue 8, 0812004 (2024)
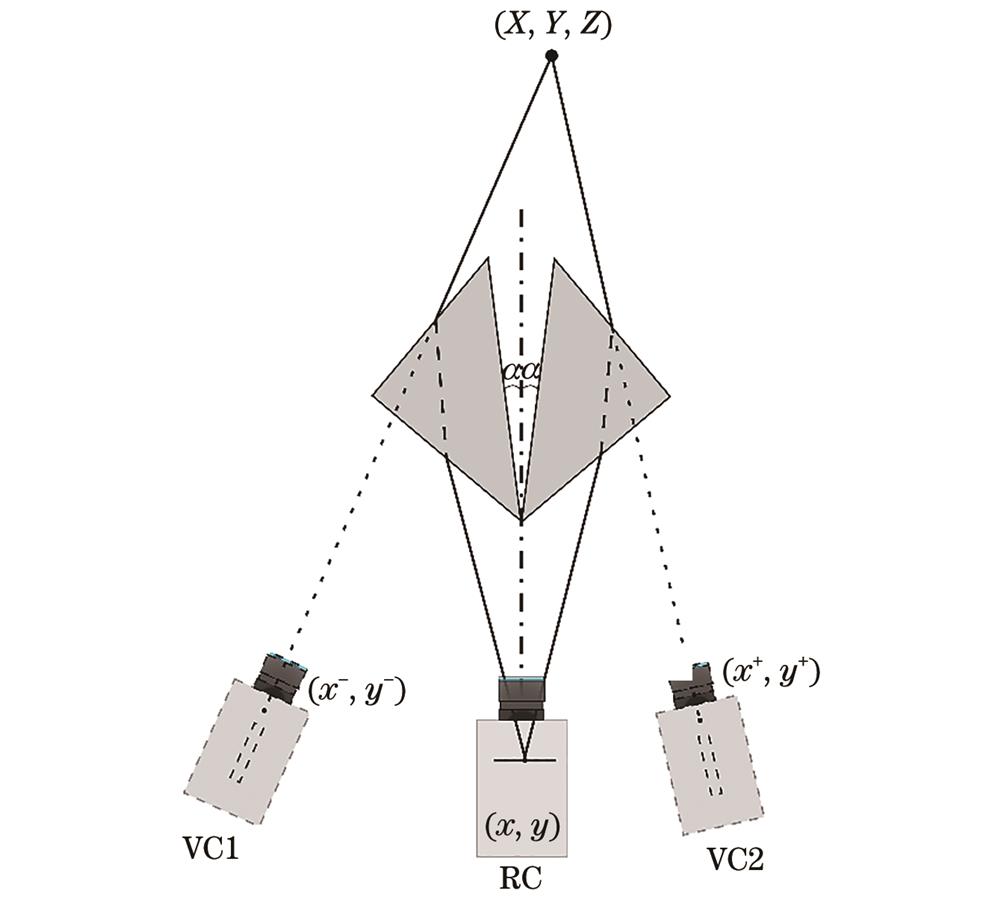
Fig. 1. Schematic of prism-splitting monocular stereo vision system
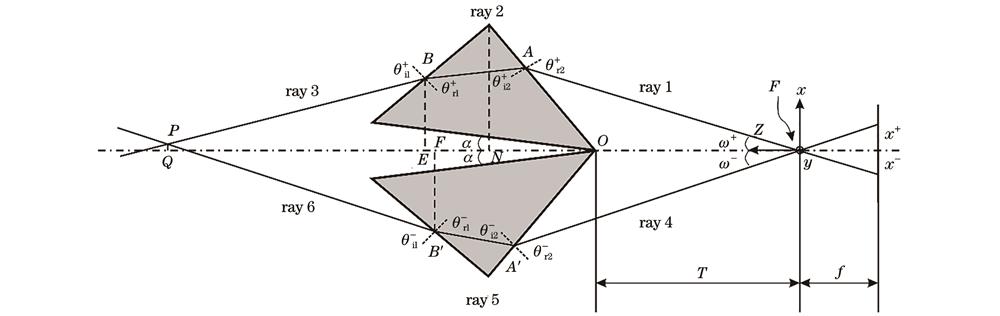
Fig. 2. Schematic of ray tracing for stereo vision system
Fig. 3. Three typical biprism postures. (a) Rotation around coincidence point; (b) offset along x-direction; (c) offset along z-direction
Fig. 4. Monocular stereo vision system based on dual-biprism and its captured images. (a) Experimental setup; (b) real image obtained by camera snapshot; (c) image obtained by left virtual camera; (d) image obtained by right virtual camera
Fig. 5. Depth information of measured object and results of profile reconstruction. (a) Two sub-images captured by camera snapshot and its RoI; (b) schematic diagram of stereo matching; (c) result of DIC; (d) disparity map; (e) depth map; (f) 3D depth map
Fig. 6. Snapshot image taken by a single camera
Fig. 7. Results of disparity variation with object distance and angle. (a) Changing object distance; (b) changing angle between prisms
Fig. 8. Results of FoV varying with biprism posture. (a) Rotation around coincidence point; (b) offset along x-direction; (c) offset along z-direction
Fig. 9. Comparison results of depth calculation method and DIC method at three cross-sections. (a) Cross-section A-A; (b) cross-section B-B; (c) cross-section C-C
Fig. 10. Error curves of cross-section data. (a) Cross-section A-A; (b) cross-section B-B; (c) cross-section C-C
Fig. 11. Comparison of profiles at cross-section B-B when object distance and angle between prisms are changed. (a) Initial position; (b) object distance decreases by 7 cm; (c) object distance decreases by 10 cm; (d) angle between prisms increases by 0.6°; (e) angle between prisms increases by 1.8°; (f) angle between prisms increases by 3°
Fig. 12. Comparison between offset coordinates obtained by corner detection and results computed by modified model. (a) Prism rotation; (b) offset of prism along x-direction; (c) offset of prism along z-direction

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20