
Feng Tian, Chao Liu, Fang Liu, Wenwen Jiang, Xin Xu, Ling Zhao. Laser Radar 3D Target Detection Based on Improved PointPillars[J]. Laser & Optoelectronics Progress, 2024, 61(8): 0812007
- Laser & Optoelectronics Progress
- Vol. 61, Issue 8, 0812007 (2024)
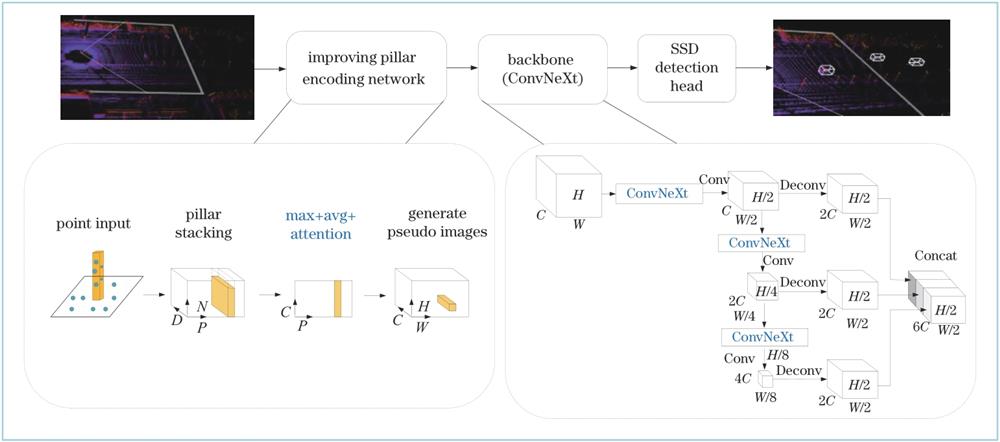
Fig. 1. Network structure

Fig. 2. Structure of the pillar feature network of the original PointPillars model
Fig. 3. Structure of improved pillar encoding network
Fig. 4. Structure of ConvNeXt module
Fig. 5. Structure of backbone network based on ConvNeXt module
Fig. 6. 3D object detection renderings and 2D images of the proposed algorithm on different scenes. (a) Scene one; (b) scene two; (c) scene three; (d) scene four
Fig. 7. Comparison of detection performance between proposed algorithm and PointPillars algorithm: complex scenes
Fig. 8. Comparison of detection performance between proposed algorithm and PointPillars algorithm: long-distance scenes
| |||||||||||||||||||||||||||||||||||||||||||||||||||||
Table 1. Comparison of mAP for different algorithms under car category
| |||||||||||||||||||||||||||||||||||||||||||||||||||||
Table 2. Comparison of mAP for different algorithms under the pedistrian category
| |||||||||||||||||||||||||||||||||||||||||||||||||||||
Table 3. Comparison of mAP for different algorithms under the cyclist category
| |||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Table 4. Results of ablation experiment

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20