Scientists have invented microrobots that can directly reach the site of disease to perform medical tasks. Microrobots-assisted in vivo drug delivery, release, and in situ surgery are therefore seen as very promising medical solutions. In recent years, more researchers are focusing on how microrobots can be truly applied for clinical therapy. Many in vivo experiments on small animals have also been carried out to validate and advance the in vivo application of the microrobots.
At present, one of the biggest challenges in extending microrobots to the clinic is still the in vivo tracking. Among many biomedical imaging methods, photoacoustic imaging (PAI) is showing its outstanding advantages in the microrobots imaging in vivo. PAI combines the contrast of optical absorption with the spatial resolution of ultrasound for deep imaging in the tissue. The resolution of PAI ranges from several to a hundred micrometers for imaging in the millimeter- to centimeter-depth tissue. Briefly, the greatest advantage of PAI is its ability of label-free imaging across scales, from several to hundreds of microns, from microscopic to macroscopic, from cell nuclei to human organs. Different from the tissue and body fluids, microrobots covered with metallic materials have strong absorption of light and produce a strong photoacoustic signal for high-contrast, high-resolution imaging, which provides a solid basis for in vivo photoacoustic tracking of the microrobots.
PAI is a new hybrid imaging technique arising from the photoacoustic effect, which is based on the target's intrinsic absorption property. The principle is that when the tissue is shone by the pulsed laser beam, the target will absorb the light and generate instantaneous heat. The heat will cause thermal expansion and generate mechanical ultrasonic wave as the photoacoustic wave. After collecting the photoacoustic wave by ultrasonic transducer and reconstructing the signals, an image reflecting the light absorption distribution in biological tissue can be required, Figure 1 is a schematic diagram of photoacoustic imaging used for in-vivo tracking of micro-robots.
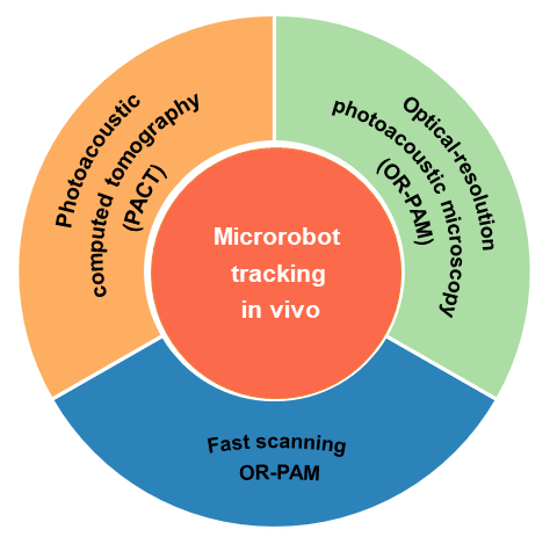
Fig.1 Schematic summary of photoacoustic imaging for microrobots tracking in vivo.
The research group led by Prof. Lidai Wang and Prof. Dong Sun from City University of Hong Kong summarized the PAI techniques, imaging systems, and their biomedical applications in microrobots tracking in vitro and in vivo. From a robotic tracking perspective, some insight into the future of PAI technology in clinical applications is provided. This review is published in Chinese Optics Letters, Volume 19, No. 11, 2021 (D. Li, et al., Review of photoacoustic imaging for microrobots tracking in vivo [Invited]).
Multiscale PAI enables tracking imaging of microrobots with different sizes for different targets. In this review, the PAI systems of photoacoustic computed tomography (PACT), optical-resolution photoacoustic microscopy (OR-PAM), and fast-scanning OR-PAM are highlighted and demonstrated from the perspective of microrobots tracking.
PACT is a reconstruction-based imaging method in photoacoustic imaging fields. PACT system adopts a wide-field illumination scheme to cover the tissue and collects the generated acoustic signals from spatially distributed sensors. The sensors array can be arranged in different layout in three-dimensional space to achieve a wider field of view detection and video-rate imaging speed, such as linear array, curved array, hemispherical array or planar array. Because of the diffused photons excitation and array-based computing reconstruction, PACT can achieve much deeper imaging depth than PAM imaging.
PACT with advantages in deep imaging and video-rate imaging speed can be used for whole-body dynamics and function imaging for small animals. Therefore, for real-time microrobots tracking in the deep tissue of the living body, PACT would be the best option. However, the limited resolution makes it difficult to track an individual microrobot less than 100 µm.
At this point, the OR-PAM compensates well for this deficiency, as its resolution can reach below 10 µm. For the high-resolution microrobots tracking in epidermal blood vessels or tissue, OR-PAM could be used as a priority. The OR-PAM can realize both subcellular multifunctional and robotic imaging, which provides a microscopic view for micro-robotic research. Finally, the polygon-scanning fast OR-PAM also demonstrates fast imaging capabilities, providing an excellent option for high-resolution real-time imaging for microrobots tracking.
For the time being, the most efficient way of driving robots in the living body is magnetic actuation. The integration of a robotic magnetic actuation system with the photoacoustic imaging system will take the future of robotic clinical applications to new heights.
In conclusion, photoacoustic imaging provides a comprehensive and superior biomedical imaging modality for microrobots navigation in living bodies. Future advances in photoacoustic imaging technology and the use of photoacoustic imaging in clinical applications will greatly facilitate the realization of robot-assisted medicine.