
Jie Hu, Han Liu, Wencai Xu, Liang Zhao. Position Detection Algorithm of Road Obstacles Based on 3D LiDAR[J]. Chinese Journal of Lasers, 2021, 48(24): 2410001
- Chinese Journal of Lasers
- Vol. 48, Issue 24, 2410001 (2021)
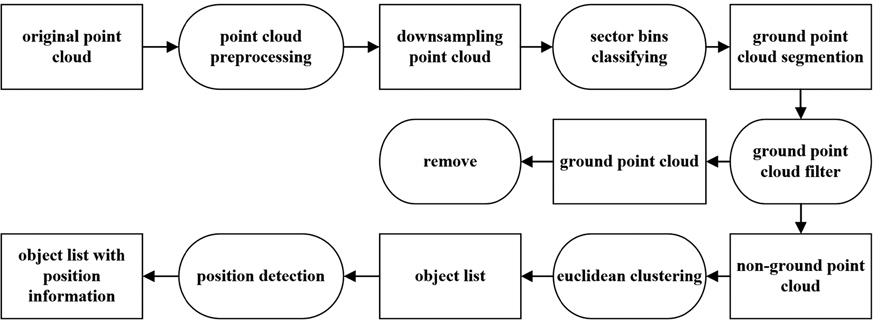
Fig. 1. Flow chart of objection position detection algorithm
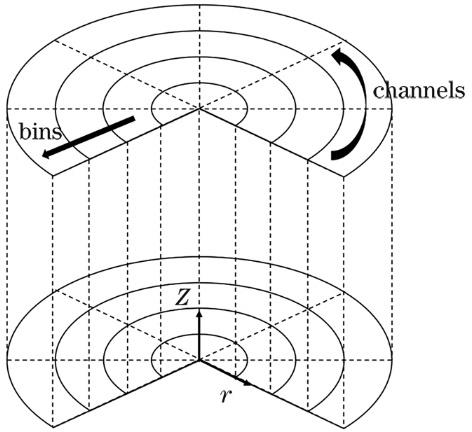
Fig. 2. Sector bins distribution and polar coordinate system
Fig. 3. Pseudo-code block diagram of ground segmentation algorithm
Fig. 4. Schematic diagram of point cloud projected by LiDAR
Fig. 5. Comparison of point clouds from different perspectives. (a) 3D view; (b) XOY plane view
Fig. 6. Object direction angle detection
Fig. 7. Coordinate system rotation process
Fig. 8. Pseudo code block diagram of direction and size detection algorithm
Fig. 9. Installation drawing of vehicle sensor
Fig. 10. Detection performance of the algorithm. (a) Velodyne VLP16; (b) LEISHEN C32151L; (c) ZVISION ML-30S
Fig. 11. Detection time of different LiDARs. (a) Velodyne VLP16; (b) LEISHEN C32151L; (c) ZVISION ML-30S
|
Table 1. Performance parameters of LiDAR
|
Table 2. Algorithm effect evaluation table unit: %

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20