
Na Li, Kuangang Fan, Yahui Liu, Qinghua Ouyang. Unmanned Aerial Vehicle Detection Based on ASRPCA Fused with Five-Frame Difference[J]. Laser & Optoelectronics Progress, 2021, 58(20): 2015007
- Laser & Optoelectronics Progress
- Vol. 58, Issue 20, 2015007 (2021)
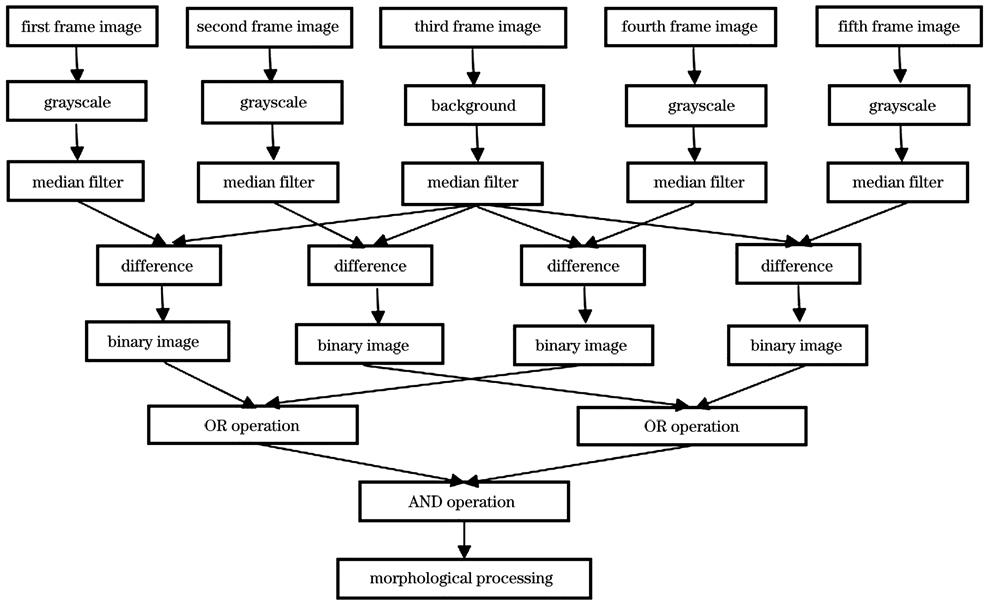
Fig. 1. Flow chart of improved algorithm
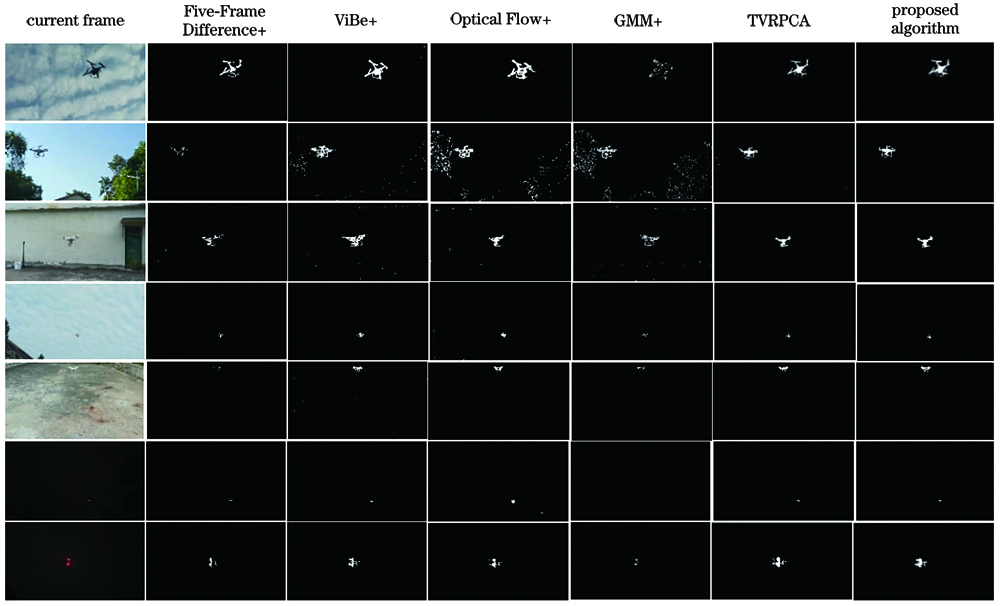
Fig. 2. Comparison results of UAV detection using different algorithms under different background sequences
Fig. 3. Gaussian noise detection results with different variances
| ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Table 1. Measured value P,R,F of various algorithms
|
Table 2. Measured value P, R, F of Gaussian noise with different variances
|
Table 3. Comparison of running time of different algorithms unit: s

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20