
Xiaojuan Ning, Zhiwei Lu, Jie Ma. Coarse-to-Fine Indoor Scene Layout Division and Structure Reconstruction[J]. Laser & Optoelectronics Progress, 2021, 58(22): 2210018
- Laser & Optoelectronics Progress
- Vol. 58, Issue 22, 2210018 (2021)
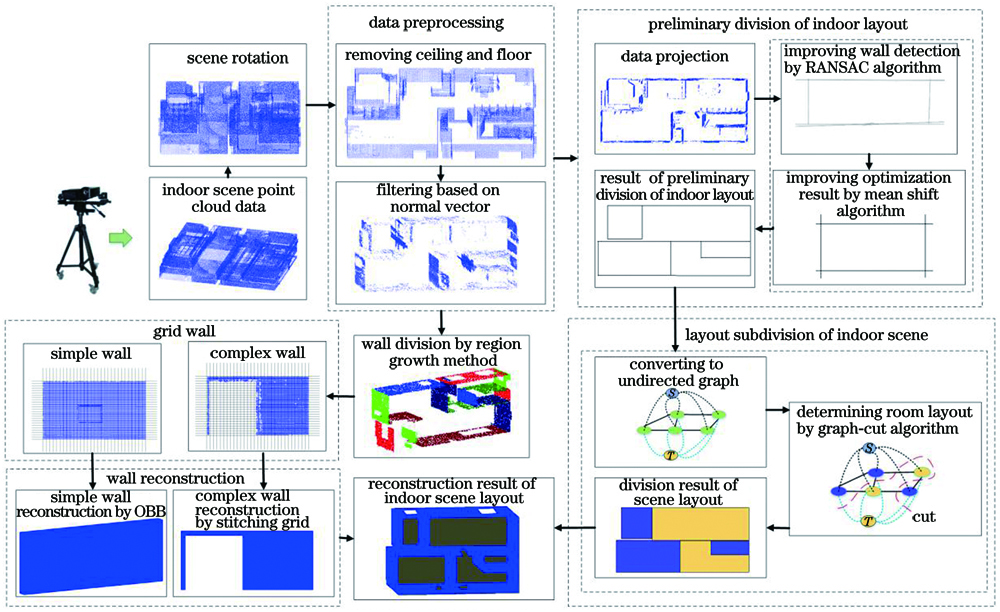
Fig. 1. Layout reconstruction of indoor scene
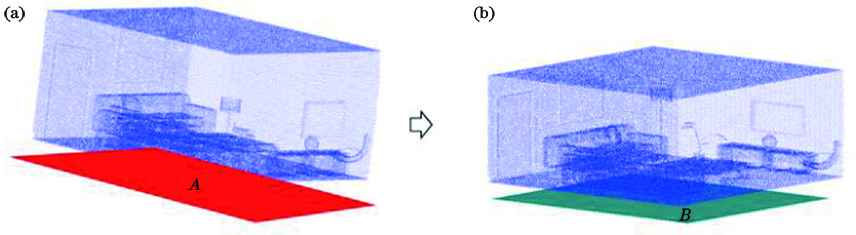
Fig. 2. Rotation result of scene Livingroom. (a) Before rotation; (b) after rotation
Fig. 3. Point distribution of scene House
Fig. 4. Data projection process
Fig. 5. Line detection result by improved RANSAC algorithm
Fig. 6. Line optimization based on improved mean shift algorithm. (a) Collinear line cluster; (b) optimization result
Fig. 7. Schematic diagram of binary labeling based on ray casting algorithm
Fig. 8. Binary labeling result of scene House
Fig. 9. Results of wall rasterization. (a) Rasterization of single wall; (b) rasterization of complex wall
Fig. 10. Floor and ceiling removal result of scene Livingroom. (a) Original scene; (b) point distribution in Z direction; (c) floor and ceiling removal scene
Fig. 11. Floor and ceiling removal result of scene House. (a) Original scene; (b) point distribution in Z direction; (c) floor and ceiling removal scene
Fig. 12. Preliminary layout division for scene Livingroom. (a) Original point cloud data; (b) data projection result; (c) preliminary layout division result
Fig. 13. Preliminary layout division for scene House. (a) Original point cloud data; (b) data projection result; (c) preliminary layout division result
Fig. 14. Results of layout subdivision. (a) Scene Livingroom; (b) scene House
Fig. 15. Comparison of opening detection result. (a1)--(a3) Real scene; (b1)--(b3) intercept data; (c1)--(c3) detection result obtained by method in Ref. [19]; (d1)--(d3) detection result obtained by proposed method
Fig. 16. Global reconstruction of scene Livingroom. (a) Reconstruction result obtained by three dimensional stacking; (b) global reconstruction result obtained by proposed method; (c) reconstruction result with ceiling removal obtained by proposed method
Fig. 17. Global reconstruction of scene House. (a) Reconstruction result obtained by three dimensional stacking; (b) global reconstruction result obtained by proposed method; (c) reconstruction result with ceiling removal obtained by proposed method
|
Table 1. Number and coordinate range of floor points and ceiling points
|
Table 2. Experimental analysis of scene global structure reconstruction

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20