This paper discusses the time-of-arrival (TOA) based indoor visible light communication (VLC) positioning system in a non-line-of-sight environment. The propagation delay is assumed to be gamma distributed. The generalized Cramer–Rao lower bound for multipath propagation is derived as the theoretical accuracy limitation. The performance of the positioning system is affected by the shape parameter and the scale parameter of gamma distribution. The influences on positioning accuracy of multipath effects are analyzed through discussing the physical meaning of the gamma distribution parameters. It is concluded that the lower bound of positioning accuracy is attained when variance of the non-line-of-sight propagation-induced path lengths is zero. The simulation result proves that the theoretical positioning accuracy is in the order of centimeters with the given scenario.
Recently, visible light communication (VLC) has been considered as the most attractive solution for indoor positioning because it has many features such as no electromagnetic interference and better positioning accuracy than radio signals. VLC technology could realize high-precision positioning of the intelligent mobile robots, which would enable them to engage in more sophisticated and complex work [1]. VLC positioning technology is also suitable for the blind navigation, which is aimed at supporting visually impaired people who travel indoors [2]. These scenarios require the high-precision positioning of submeters, which traditional radio signal positioning cannot afford. With all of these advantages, the VLC positioning technology is becoming a strong candidate for future indoor positioning applications.
The analysis of theoretical accuracy often provides a guide to practical applications, which could help people understand the performance limit and discover a proper method to approach it. But only few articles have analyzed the theoretical accuracy of the indoor VLC positioning system. The authors in [3] gave an indoor VLC positioning system based on the received signal strength indicator (RSSI) method and analyzed the impact of the LED parameters on positioning accuracy. It is concluded that, if the diffuse channel gain is measured previously in a certain environment and the modulation speed is far less than the channel cut-off frequency, the theoretical accuracy limit of VLC RSSI algorithm is not affected by multipath link. Reference [4] calculated the theoretical accuracy of time of arrival (TOA) algorithm and analyzed the influence of the signal parameters on distance estimates.
In the above articles, there are no studies of the impact of multipath effects on theoretical accuracy of a TOA-based indoor VLC positioning system in a non-line-of-sight (NLOS) environment, whereas the effect of NLOS propagation delays cannot be omitted in practical scenarios. Furthermore, in the condition that the statistical distribution of propagation delays in a NLOS environment is known, the range of theoretical accuracy limit has not been obtained. Thus, this paper has the important guiding significance in practical applications.
Sign up for Photonics Research TOC. Get the latest issue of Photonics Research delivered right to you!Sign up now
In this paper, the VLC optical channel models are set up at first. The TOA positioning system based on white lighting LEDs is described. The expression of a generalized Cramer–Rao lower bound (G-CRLB) based on a VLC TOA algorithm in a NLOS environment is described in detail. Then, we obtain the upper and lower bounds of the theoretical accuracy. The physical meaning of the gamma distribution parameters is analyzed. The simulation results show that the G-CRLB in the level of centimeters could be achieved with typical parameter values.
2. G-CRLB of TOA
In the VLC positioning system, we call the LEDs used for positioning base stations (BSs) and the object needed to locate is the mobile station (MS). We assume the optical filter with ideal bandpass, which causes no loss in the passband and completely blocks any optical frequencies in the stop band.
For ranging estimates based on intensity-modulated signals transmitted by LEDs, the received optical signal of a single path despite whether it is line-of sight (LOS) or NLOS is [4] where is the responsivity of the photodiode, is the time taken for the light to travel from the transmitter to the receiver, is the transmitted ranging optical signal, is the noise signal, which is mainly composed by shot noise and can be modeled as additive white Gaussian noise (AWGN) with single-sided spectral density . is the attenuation of the optical channel. We assume that the optical axis of LEDs and receivers parallel to each other [3]: where is the detector effective area, is the Lambertian order, is the distance between the LED and the MS, and is the height of the room. We assume that the illumination distribution of LEDs conforms to approximate Lambertian model.
In order to meet the condition of non-negativity and “smooth” for G-CRLB, should be windowed as [4] where is the window function, from which TOA can be calculated, is the average emitted optical power, is the modulation frequency of the sinusoid signal, and is the period of window function and signal duration [4].
Let be the set of indices of all BSs whose locations are known. Denote the set of indices of BSs that receive NLOS signals by . The complement of , denoted as , is the set of indices of LOS stations, with its cardinality being . The estimated NLOS propagation-induced path lengths are . We define an dimensional vector as The time-delay estimation can be approximated as Because is AWGN, we assume the estimation noise conforms to Gaussian distribution [5].
Let be the time delay of the received signal at the -th BS: where if , and is the speed of light. The joint probability density function of conditioned on is We assume single-path propagation in both LOS and NLOS environments, which means that the strongest or first arriving component should be selected.
A. Case Where No Prior NLOS Statistics Are Available
The G-CRLB is independent of NLOS signals when no prior NLOS statistics are available, where we use CRLB to obtain the theoretical positioning accuracy [5]. The CRLB is defined as where is the Fisher information matrix (FIM).
And The matrix can be calculated [5] as The matrix can be calculated [5] as We can obtain one boundary of the theoretical accuracy: where is the electrical energy of the signal , which is defined as [4], is the standard deviation of the shot noise, and . is the effective bandwidth of the signal .
Note that the window function is a narrowband signal whose bandwidth is much lower than the frequency . Thus, and have the relationship of [4]
B. Case Where Prior NLOS Statistics Are Available
In some cases, we may have the probability distribution of the prior NLOS statistics based on some statistical scattering models. Reference [6] points out that the gamma distribution is the best found for diffuse delay spreads, and varying the reflectivity of the walls did not affect the distribution fit tests.
Here, the amplifier gain in a receiver and its effect to signal power and noise power are not considered in this paper [4]. For simplicity, we assume that the NLOS propagation-induced path lengths are independent [5]. Then, we use gamma distribution to model the NLOS propagation-induced path lengths [6]: where is the shape parameter, is the scale parameter, and is the gamma function, which is defined as .
In this case, we use the G-CRLB to obtain the theoretical positioning accuracy [5]. The G-CRLB is defined as where is the FIM consisting of two components: Subscripts and stand for “data” and “prior” information.
Noting that is actually independent of , we reach Equation (15) can be simplified in the following three cases.
For , For , For ,
For the other cases of and , we may not be able to find a closed-form expression for Eq. (18).
For , , , we can obtain
Thus, another boundary of the theoretical accuracy for the MS is The parameter can be viewed as the variance of [5]. The G-CRLB bound of Eq. (13) is attained when , which means infinitely large variances and no information on at all. The bound of Eq. (24) is attained when approaches 2 for all NLOS delays, which means zero variance and NLOS-induced path lengths are exactly obtained. According to information theory, if we know more information about the NLOS delays, the positioning accuracy is higher.
Because , the bound of Eq. (13) is greater than that of Eq. (24). Thus, we can draw the conclusion that Eqs. (13) and (24) give the upper and lower bounds of the G-CRLB for the MS position estimate, respectively:
3. NUMERICAL RESULTS
In this section, the empirical parameters of VLC rms delay spread are first obtained. Next, we evaluate the influences of gamma distribution parameters and noise on G-CRLB by simulation.
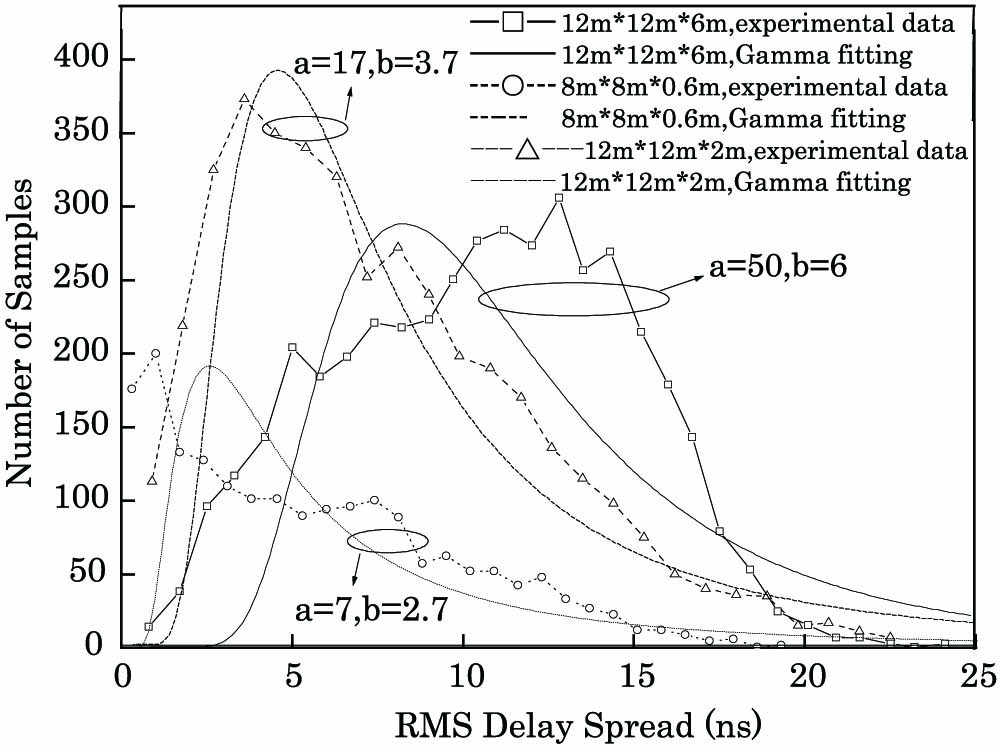
In previous work, models for the rms delay spread of diffuse channels were developed [6]. We use the data of reference [6] for simulation. Figure 1 gives the result. As summarized, the gamma distribution is the best empirical models for diffuse delay spreads.
Figure 1.Experimental data and gamma fitting of RMS delay spread in rooms with different sizes.
Figure 2 plots the G-CRLB versus the emitted optical power in rooms with different sizes. Here, only the lower bound is discussed. We select the parameters of , , , , and [4,7,8,9]. According to the experiments, the distribution fits the gamma model well when the data rate of optical wireless communication is below . We choose direct modulation and . Here, the pre-equalization technique is considered to extend the LED modulation bandwidth.
Figure 2.G-CRLB versus the emitted optical power with different values of and .
Figure 2 shows that the G-CRLB increases with increasing and . This is because the variance of decreases when increases, and the influence of is higher than that of . We can obtain that the bound is better than 1 cm for an average transmitted optical power of 1 W in a room.
The changes of the upper and lower bounds of the G-CRLB with noise are analyzed. The single-sided spectral density of the noise is [4] where denotes the charge on an electron, is the background spectral irradiance, is the bandwidth of the optical filter in front of the photodiode, and and are the same as above. The optical power of LED is 1 W. varies from to [10].
In Fig. 3, we can see that the influences of noise on the upper bound are significantly higher than on the lower bound. It is probably because we know more information about multipath information and the variance of NLOS delay has more influence than noise for the lower bound.
Figure 3.G-CRLB versus the background spectral irradiance with different values of and .
In this paper, we derive the G-CRLB model of the VLC positioning system based on a TOA algorithm in a NLOS environment. The G-CRLB range of the theoretical position estimation is obtained. For the lower bound, the variance of the NLOS delay is zero, which implies that the NLOS-induced path lengths are exactly obtained. In the upper bound, infinitely large variance means no information on NLOS delays at all. Models for the rms delay spread of diffuse channels are developed. We obtain the value of shape and scale parameters of gamma distribution in different rooms from experiment data and evaluate their influences on G-CRLB. It is concluded that the bound is in the order of centimeters for an average transmitted optical power of 1 W. Changes of the upper and lower bounds of G-CRLB with noise are also analyzed. We can see that the influences of noise on the upper bound are significantly higher than the lower bound.
In future works, further detailed research on the influence of incidence angles of light on the G-CRLB will be a priority. In addition, positioning algorithms for mobile tracking in a NLOS environment are planned for study.
Acknowledgment
Acknowledgment. This work was supported by the National Key Basic Research Program of China (973 program) under grant 2013CB329204 and the Natural Science Foundation of China under grant 61375083.
References
[1] R. Murai, T. Sakai, H. Kawano, Y. Matsukawa, Y. Kitano, Y. Honda, K. C. Campbell. A novel visible light communication system for enhanced control of autonomous delivery robots in a hospital. IEEE/SICE International Symposium on System Integration (SII), 510–516, 16-18(2012).
[2] M. Nakajima, S. Haruyama. Indoor navigation system for visually impaired people using visible light communication and compensated geomagnetic sensing. 1st IEEE International Conference on Communications in China (ICCC), 524–529, 15-17(2012).
[3] X. Zhang, J. Duan, Y. Fu, A. Shi. Theoretical accuracy analysis of indoor visible light communication positioning system based on received signal strength indicator. J. Lightwave Technol., 32, 3578-3584(2014).
[10] Q. Jeffery, F. Greg, B. Patrick, E. Eric. Quantifying the indoor light environment-testing for light stability in retail & residential environments. International Conference on Digital Printing Technologies NIP & Digital Fabrication Conference, 689-698(2004).